Lesson summary "Rectilinear and curvilinear motion. RD body in a circle"
You are well aware that, depending on the shape of the trajectory, the movement is divided into rectilinear and curvilinear. We learned how to work with rectilinear motion in previous lessons, namely, to solve the main problem of mechanics for this type of motion.
However, it is clear that in the real world we are most often dealing with curvilinear motion, when the trajectory is a curved line. Examples of such movement are the trajectory of a body thrown at an angle to the horizon, the movement of the Earth around the Sun, and even the trajectory of your eyes, which are now following this abstract.
This lesson will be devoted to the question of how the main problem of mechanics is solved in the case of curvilinear motion.
To begin with, let's determine what fundamental differences the curvilinear motion (Fig. 1) has relative to the rectilinear one and what these differences lead to.
Rice. 1. Trajectory of curvilinear motion
Let's talk about how it is convenient to describe the motion of a body during curvilinear motion.
You can break the movement into separate sections, on each of which the movement can be considered rectilinear (Fig. 2).

Rice. 2. Partitioning of curvilinear motion into segments of rectilinear motion
However, the following approach is more convenient. We will represent this movement as a set of several movements along arcs of circles (Fig. 3). Note that there are fewer such partitions than in the previous case, in addition, the movement along the circle is curvilinear. In addition, examples of movement in a circle in nature are very common. From this we can conclude:
In order to describe curvilinear motion, one must learn to describe motion along a circle, and then represent an arbitrary motion as a set of motions along arcs of circles.

Rice. 3. Partitioning of a curvilinear motion into motions along arcs of circles
So, let's start the study of curvilinear motion with the study of uniform motion in a circle. Let's see what are the fundamental differences between curvilinear and rectilinear motion. To begin with, recall that in the ninth grade we studied the fact that the speed of a body when moving along a circle is directed tangentially to the trajectory (Fig. 4). By the way, you can observe this fact in practice if you look at how sparks move when using a grindstone.

Consider the motion of a body along a circular arc (Fig. 5).

Rice. 5. The speed of the body when moving in a circle
Please note that in this case, the modulus of the body's speed at the point is equal to the modulus of the body's speed at the point:
However, the vector is not equal to the vector . So, we have a velocity difference vector (Fig. 6):

Rice. 6. Velocity difference vector
Moreover, the change in speed occurred after a while. Thus, we get the familiar combination:
![]()
This is nothing more than a change in speed over a period of time, or the acceleration of a body. We can draw a very important conclusion:
Movement along a curved path is accelerated. The nature of this acceleration is a continuous change in the direction of the velocity vector.
Once again, we note that, even if it is said that the body moves uniformly in a circle, it means that the modulus of the body's velocity does not change. However, such movement is always accelerated, since the direction of the velocity changes.
In the ninth grade, you studied what this acceleration is and how it is directed (Fig. 7). Centripetal acceleration is always directed towards the center of the circle along which the body is moving.

Rice. 7. Centripetal acceleration
The centripetal acceleration module can be calculated using the formula:
We turn to the description of the uniform motion of the body in a circle. Let's agree that the speed that you used while describing the translational motion will now be called linear speed. And by linear speed we will understand the instantaneous speed at the point of the trajectory of a rotating body.

Rice. 8. Movement of disk points
Consider a disk that, for definiteness, rotates clockwise. On its radius, we mark two points and (Fig. 8). Consider their movement. For some time, these points will move along the arcs of the circle and become points and . Obviously, the point has moved more than the point . From this we can conclude that the farther the point is from the axis of rotation, the greater the linear speed it moves.
However, if we carefully look at the points and , we can say that the angle by which they turned relative to the axis of rotation remained unchanged. It is the angular characteristics that we will use to describe the motion in a circle. Note that to describe the motion in a circle, we can use corner characteristics.
Let's start the consideration of motion in a circle with the simplest case - uniform motion in a circle. Recall that a uniform translational motion is a motion in which the body makes the same displacements for any equal intervals of time. By analogy, we can give a definition of uniform motion in a circle.
Uniform motion in a circle is a motion in which for any equal intervals of time the body rotates through the same angles.
Similarly to the concept of linear velocity, the concept of angular velocity is introduced.
Angular velocity of uniform motion ( called a physical quantity equal to the ratio of the angle at which the body turned to the time during which this turn occurred.
In physics, the radian measure of an angle is most commonly used. For example, angle at is equal to radians. The angular velocity is measured in radians per second:
Let's find the relationship between the angular velocity of a point and the linear velocity of this point.

Rice. 9. Relationship between angular and linear speed
The point passes during rotation an arc of length , while turning through an angle . From the definition of the radian measure of an angle, we can write:
Let's divide the left and right parts of the equality by the time interval , for which the movement was made, then we will use the definition of angular and linear velocities:
Note that the farther the point is from the axis of rotation, the higher its linear velocity. And the points located on the very axis of rotation are fixed. An example of this is a carousel: the closer you are to the center of the carousel, the easier it is for you to stay on it.
This dependence of linear and angular velocities is used in geostationary satellites (satellites that are always above the same point on the earth's surface). Thanks to such satellites, we are able to receive television signals.
Recall that earlier we introduced the concepts of period and frequency of rotation.
The period of rotation is the time of one complete revolution. The period of rotation is indicated by a letter and is measured in seconds in SI:
The frequency of rotation is a physical quantity equal to the number of revolutions that the body makes per unit of time.
The frequency is indicated by a letter and is measured in reciprocal seconds:
They are related by:
There is a relationship between the angular velocity and the frequency of rotation of the body. If we remember that a full revolution is , it is easy to see that the angular velocity is:
![]()
By substituting these expressions into the dependence between the angular and linear speed, one can obtain the dependence of the linear speed on the period or frequency:
![]()
Let us also write down the relationship between centripetal acceleration and these quantities:
Thus, we know the relationship between all the characteristics of uniform motion in a circle.
Let's summarize. In this lesson, we started to describe curvilinear motion. We understood how to relate curvilinear motion to circular motion. Circular motion is always accelerated, and the presence of acceleration causes the fact that the speed always changes its direction. Such acceleration is called centripetal. Finally, we remembered some characteristics of motion in a circle (linear velocity, angular velocity, period and frequency of rotation) and found the relationship between them.
Bibliography
- G.Ya. Myakishev, B.B. Bukhovtsev, N.N. Sotsky. Physics 10. - M .: Education, 2008.
- A.P. Rymkevich. Physics. Problem book 10-11. - M.: Bustard, 2006.
- O.Ya. Savchenko. Problems in physics. - M.: Nauka, 1988.
- A.V. Peryshkin, V.V. Krauklis. Physics course. T. 1. - M .: State. uch.-ped. ed. min. education of the RSFSR, 1957.
- Ayp.ru ().
- Wikipedia ().
Homework
By solving the tasks for this lesson, you will be able to prepare for questions 1 of the GIA and questions A1, A2 of the Unified State Examination.
- Problems 92, 94, 98, 106, 110 - Sat. tasks of A.P. Rymkevich, ed. ten
- Calculate the angular velocity of the minute, second and hour hands of the clock. Calculate the centripetal acceleration acting on the tips of these arrows if the radius of each of them is one meter.
With the help of this lesson, you will be able to independently study the topic “Rectilinear and curvilinear motion. The motion of a body in a circle with a constant modulo velocity. First, we characterize rectilinear and curvilinear motion by considering how, in these types of motion, the velocity vector and the force applied to the body are related. Next, we consider a special case when the body moves along a circle with a constant modulo speed.
In the previous lesson, we considered issues related to the law of universal gravitation. The topic of today's lesson is closely related to this law, we will turn to the uniform motion of a body in a circle.
Earlier we said that motion - this is a change in the position of a body in space relative to other bodies over time. Movement and direction of movement are characterized, among other things, by speed. The change in speed and the type of movement itself are associated with the action of a force. If a force acts on a body, then the body changes its speed.
If the force is directed parallel to the movement of the body, then such a movement will be straightforward(Fig. 1).
Rice. 1. Rectilinear motion
curvilinear there will be such a movement when the speed of the body and the force applied to this body are directed relative to each other at a certain angle (Fig. 2). In this case, the speed will change its direction.

Rice. 2. Curvilinear motion
So, at rectilinear motion the velocity vector is directed in the same direction as the force applied to the body. BUT curvilinear motion is such a movement when the velocity vector and the force applied to the body are located at some angle to each other.
Consider a special case of curvilinear motion, when the body moves in a circle with a constant speed in absolute value. When a body moves in a circle at a constant speed, only the direction of the speed changes. Modulo it remains constant, but the direction of the velocity changes. Such a change in speed leads to the presence of an acceleration in the body, which is called centripetal.

Rice. 6. Movement along a curved path
If the trajectory of the body's motion is a curve, then it can be represented as a set of motions along arcs of circles, as shown in Fig. 6.

On fig. 7 shows how the direction of the velocity vector changes. The speed during such a movement is directed tangentially to the circle along the arc of which the body moves. Thus, its direction is constantly changing. Even if the modulo speed remains constant, a change in speed leads to an acceleration:
![]()
In this case acceleration will be directed towards the center of the circle. That is why it is called centripetal.
Why is centripetal acceleration directed towards the center?
Recall that if a body moves along a curved path, then its velocity is tangential. Velocity is a vector quantity. A vector has a numerical value and a direction. The speed as the body moves continuously changes its direction. That is, the difference in speeds at different points in time will not be equal to zero (), in contrast to a rectilinear uniform motion.
So, we have a change in speed over a certain period of time. Relation to is acceleration. We come to the conclusion that, even if the speed does not change in absolute value, a body that performs uniform motion in a circle has an acceleration.
Where is this acceleration directed? Consider Fig. 3. Some body moves curvilinearly (in an arc). The speed of the body at points 1 and 2 is tangential. The body moves uniformly, that is, the modules of the velocities are equal: , but the directions of the velocities do not coincide.

Rice. 3. Movement of the body in a circle
Subtract the speed from and get the vector . To do this, you need to connect the beginnings of both vectors. In parallel, we move the vector to the beginning of the vector . We build up to a triangle. The third side of the triangle will be the velocity difference vector (Fig. 4).

Rice. 4. Velocity difference vector
The vector is directed towards the circle.
Consider a triangle formed by the velocity vectors and the difference vector (Fig. 5).

Rice. 5. Triangle formed by velocity vectors
This triangle is isosceles (velocity modules are equal). So the angles at the base are equal. Let's write the equation for the sum of the angles of a triangle:
![]()
Find out where the acceleration is directed at a given point of the trajectory. To do this, we begin to bring point 2 closer to point 1. With such an unlimited diligence, the angle will tend to 0, and the angle - to. The angle between the velocity change vector and the velocity vector itself is . The speed is directed tangentially, and the velocity change vector is directed towards the center of the circle. This means that the acceleration is also directed towards the center of the circle. That is why this acceleration is called centripetal.
How to find centripetal acceleration?
Consider the trajectory along which the body moves. In this case, this is an arc of a circle (Fig. 8).

Rice. 8. Movement of the body in a circle
The figure shows two triangles: a triangle formed by the velocities, and a triangle formed by the radii and the displacement vector. If points 1 and 2 are very close, then the displacement vector will be the same as the path vector. Both triangles are isosceles with the same vertex angles. So the triangles are similar. This means that the corresponding sides of the triangles are in the same ratio:
The displacement is equal to the product of speed and time: . Substituting this formula, you can get the following expression for centripetal acceleration:
Angular velocity denoted by the Greek letter omega (ω), it indicates at what angle the body rotates per unit time (Fig. 9). This is the magnitude of the arc, in degrees, traversed by the body in some time.

Rice. 9. Angular speed
Note that if a rigid body rotates, then the angular velocity for any points on this body will be a constant value. The point is closer to the center of rotation or farther - it does not matter, that is, it does not depend on the radius.
The unit of measurement in this case will be either degrees per second (), or radians per second (). Often the word "radian" is not written, but simply written. For example, let's find what the angular velocity of the Earth is. The earth makes a full rotation in one hour, and in this case we can say that the angular velocity is equal to:
![]()
Also pay attention to the relationship between angular and linear velocities:
The linear speed is directly proportional to the radius. The larger the radius, the greater the linear speed. Thus, moving away from the center of rotation, we increase our linear speed.
It should be noted that motion in a circle at a constant speed is a special case of motion. However, circular motion can also be uneven. The speed can change not only in direction and remain the same in absolute value, but also change in its value, i.e., in addition to changing direction, there is also a change in the speed module. In this case, we are talking about the so-called accelerated circular motion.
What is a radian?
There are two units for measuring angles: degrees and radians. In physics, as a rule, the radian measure of an angle is the main one.
Let's construct a central angle , which relies on an arc of length .
Depending on the shape of the trajectory, the movement can be divided into rectilinear and curvilinear. Most often, you will encounter curvilinear movements when the path is represented as a curve. An example of this type of movement is the path of a body thrown at an angle to the horizon, the movement of the Earth around the Sun, planets, and so on.
Picture 1 . Trajectory and displacement in curvilinear motion
Definition 1Curvilinear motion called the movement, the trajectory of which is a curved line. If the body moves along a curved path, then the displacement vector s → is directed along the chord, as shown in Figure 1, and l is the length of the path. The direction of the instantaneous velocity of the body is tangential at the same point of the trajectory where the moving object is currently located, as shown in Figure 2.

Figure 2. Instantaneous speed in curvilinear motion
Definition 2
Curvilinear motion of a material point called uniform when the modulus of speed is constant (motion in a circle), and uniformly accelerated with a changing direction and modulus of speed (movement of a thrown body).
Curvilinear motion is always accelerated. This is explained by the fact that even with an unchanged speed modulus, but a changed direction, there is always an acceleration.
In order to investigate the curvilinear motion of a material point, two methods are used.
The path is divided into separate sections, on each of which it can be considered straight, as shown in Figure 3.
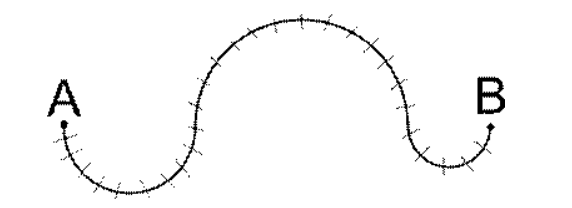
Figure 3. Splitting curvilinear motion into translational
Now for each section, you can apply the law of rectilinear motion. This principle is accepted.
The most convenient solution method is considered to be the representation of the path as a set of several movements along arcs of circles, as shown in Figure 4. The number of partitions will be much less than in the previous method, in addition, the movement around the circle is already curvilinear.

Figure 4. Partitioning of a curvilinear motion into motions along arcs of circles
Remark 1
To record a curvilinear movement, it is necessary to be able to describe movement along a circle, to represent an arbitrary movement in the form of sets of movements along the arcs of these circles.
The study of curvilinear motion includes the compilation of a kinematic equation that describes this motion and allows you to determine all the characteristics of the motion from the available initial conditions.
Example 1
Given a material point moving along a curve, as shown in Figure 4. The centers of the circles O 1 , O 2 , O 3 are located on one straight line. Need to find a move
s → and the length of the path l during the movement from point A to B.
Decision
By condition, we have that the centers of the circle belong to one straight line, hence:
s → = R 1 + 2 R 2 + R 3 .
Since the trajectory of motion is the sum of semicircles, then:
l ~ A B \u003d π R 1 + R 2 + R 3.
Answer: s → \u003d R 1 + 2 R 2 + R 3, l ~ A B \u003d π R 1 + R 2 + R 3.
Example 2
The dependence of the path traveled by the body on time is given, represented by the equation s (t) \u003d A + B t + C t 2 + D t 3 (C \u003d 0, 1 m / s 2, D \u003d 0, 003 m / s 3) . Calculate after what period of time after the start of movement the acceleration of the body will be equal to 2 m / s 2
Decision

Answer: t = 60 s.
If you notice a mistake in the text, please highlight it and press Ctrl+Enter
With curvilinear motion, the direction of the velocity vector changes. In this case, its module, i.e., the length, can also change. In this case, the acceleration vector is decomposed into two components: tangent to the trajectory and perpendicular to the trajectory (Fig. 10). The component is called tangential(tangential) acceleration, component - normal(centripetal) acceleration.

Curvilinear acceleration
Tangential acceleration characterizes the rate of change of linear velocity, and normal acceleration characterizes the rate of change of direction.
The total acceleration is equal to the vector sum of the tangential and normal accelerations:
 (15)
(15)
The total acceleration modulus is:
 .
.
Consider the uniform motion of a point along a circle. Wherein  and
and  . Let the point be in position 1 at the considered time t (Fig. 11). After time Δt, the point will be in position 2, having traveled the path Δs, equal to the arc 1-2. In this case, the speed of the point v gets an increment Δv, as a result of which the velocity vector, remaining unchanged in magnitude, will turn through an angle Δφ
, coinciding in magnitude with the central angle based on an arc of length Δs:
. Let the point be in position 1 at the considered time t (Fig. 11). After time Δt, the point will be in position 2, having traveled the path Δs, equal to the arc 1-2. In this case, the speed of the point v gets an increment Δv, as a result of which the velocity vector, remaining unchanged in magnitude, will turn through an angle Δφ
, coinciding in magnitude with the central angle based on an arc of length Δs:
 (16)
(16)
where R is the radius of the circle along which the point moves. Let's find the increment of the velocity vector To do this, we'll move the vector  so that its beginning coincides with the beginning of the vector . Then the vector will be represented by a segment drawn from the end of the vector to the end of the vector . This segment serves as the base of an isosceles triangle with sides and and angle Δφ at the top. If the angle Δφ is small (which is true for small Δt), for the sides of this triangle we can approximately write:
so that its beginning coincides with the beginning of the vector . Then the vector will be represented by a segment drawn from the end of the vector to the end of the vector . This segment serves as the base of an isosceles triangle with sides and and angle Δφ at the top. If the angle Δφ is small (which is true for small Δt), for the sides of this triangle we can approximately write:
 .
.
Substituting here Δφ from (16), we obtain an expression for the modulus of the vector:
 .
.
Dividing both parts of the equation by Δt and making the limit transition, we obtain the value of centripetal acceleration:
Here the quantities v and R are constant, so they can be taken out of the limit sign. The ratio limit is the speed modulus  It is also called linear speed.
It is also called linear speed.

Radius of curvature
The circle radius R is called radius of curvature trajectories. The reciprocal of R is called the curvature of the path:
 .
.
where R is the radius of the circle in question. If α is the central angle corresponding to the arc of the circle s, then, as is known, the following relation holds between R, α and s:
s = Ra. (18)
The concept of the radius of curvature applies not only to a circle, but to any curved line. The radius of curvature (or its reciprocal - curvature) characterizes the degree of curvature of the line. The smaller the radius of curvature (respectively, the greater the curvature), the more the line is bent. Let's consider this concept in more detail.
The circle of curvature of a flat line at some point A is the limiting position of a circle passing through point A and two other points B 1 and B 2 as they infinitely approach point A (in Fig. 12, the curve is drawn by a solid line, and the circle of curvature is dashed). The radius of the circle of curvature gives the radius of curvature of the curve in question at point A, and the center of this circle is the center of curvature of the curve for the same point A.
Draw at points B 1 and B 2 the tangents B 1 D and B 2 E to the circle passing through the points B 1 , A and B 2 . The normals to these tangents B 1 C and B 2 C will be the radii R of the circle and intersect at its center C. Let us introduce the angle Δα between the normals B1C and B 2 C; obviously, it is equal to the angle between the tangents B 1 D and B 2 E. Let's designate the section of the curve between the points B 1 and B 2 as Δs. Then according to formula (18):
 .
.

Circle of curvature of a flat curved line

Determining the curvature of a plane curve at different points
On fig. 13 shows circles of curvature of a flat line at different points. At point A 1 , where the curve is flatter, the radius of curvature is greater than at point A 2 , respectively, the curvature of the line at point A 1 will be less than at point A 2 . At point A 3 the curve is even flatter than at points A 1 and A 2 , so the radius of curvature at this point will be larger and the curvature smaller. In addition, the circle of curvature at point A 3 lies on the other side of the curve. Therefore, the magnitude of curvature at this point is assigned a sign opposite to the sign of curvature at points A 1 and A 2: if the curvature at points A 1 and A 2 is considered positive, then the curvature at point A 3 will be negative.
6. curvilinear movement. Angular displacement, angular velocity and acceleration of the body. Path and displacement during curvilinear motion of the body.
Curvilinear motion- this is a movement whose trajectory is a curved line (for example, a circle, an ellipse, a hyperbola, a parabola). An example of a curvilinear movement is the movement of the planets, the end of the clock hand on the dial, etc. In general curvilinear speed changes in size and direction.
Curvilinear motion of a material point is considered uniform motion if the module speed constant (for example, uniform motion in a circle), and uniformly accelerated if the module and direction speed changes (for example, the movement of a body thrown at an angle to the horizon).
Rice. 1.19. Trajectory and displacement vector in curvilinear motion.
When moving along a curved path displacement vector directed along the chord (Fig. 1.19), and l- length trajectories . The instantaneous speed of the body (that is, the speed of the body at a given point in the trajectory) is directed tangentially at that point in the trajectory where the moving body is currently located (Fig. 1.20).
 Rice. 1.20. Instantaneous velocity in curvilinear motion.
Rice. 1.20. Instantaneous velocity in curvilinear motion.
Curvilinear motion is always accelerated motion. I.e curvilinear acceleration is always present, even if the modulus of the speed does not change, but only the direction of the speed changes. The change in speed per unit of time is tangential acceleration :
 or
or 
Where v τ , v 0 are the speeds at the moment of time t 0 + Δt and t 0 respectively.
Tangential acceleration at a given point of the trajectory, the direction coincides with the direction of the velocity of the body or is opposite to it.
Normal acceleration is the change in speed in direction per unit of time:

Normal acceleration directed along the radius of curvature of the trajectory (toward the axis of rotation). Normal acceleration is perpendicular to the direction of velocity.
centripetal acceleration is the normal acceleration for uniform circular motion.
Full acceleration with equally variable curvilinear motion of the body equals:

The movement of a body along a curvilinear trajectory can be approximately represented as movement along the arcs of some circles (Fig. 1.21).
 Rice. 1.21. The movement of the body during curvilinear motion.
Rice. 1.21. The movement of the body during curvilinear motion.
Curvilinear motion
Curvilinear movements- movements, the trajectories of which are not straight, but curved lines. Planets and river waters move along curvilinear trajectories.
Curvilinear motion is always motion with acceleration, even if the absolute value of the speed is constant. Curvilinear motion with constant acceleration always occurs in the plane in which the acceleration vectors and the initial velocities of the point are located. In the case of curvilinear motion with constant acceleration in the plane xOy projections v x and v y its speed on the axis Ox and Oy and coordinates x and y points at any time t determined by the formulas
![]()
![]()
A special case of curvilinear motion is circular motion. Circular motion, even uniform, is always accelerated motion: the velocity modulus is always directed tangentially to the trajectory, constantly changing direction, so circular motion always occurs with centripetal acceleration where r is the radius of the circle.
The acceleration vector when moving along a circle is directed towards the center of the circle and perpendicular to the velocity vector.
In curvilinear motion, acceleration can be represented as the sum of the normal and tangential components:
Normal (centripetal) acceleration is directed towards the center of curvature of the trajectory and characterizes the change in speed in the direction:
v- instantaneous speed, r is the radius of curvature of the trajectory at a given point.
Tangential (tangential) acceleration is directed tangentially to the trajectory and characterizes the change in speed modulo.
The total acceleration with which a material point moves is equal to:

In addition to centripetal acceleration, the most important characteristics of uniform motion in a circle are the period and frequency of revolution.
Period of circulation is the time it takes for the body to complete one revolution .
The period is denoted by the letter T(c) and is determined by the formula:
where t- turnaround time P- the number of revolutions made during this time.
Frequency of circulation- this is a value numerically equal to the number of revolutions made per unit of time.
The frequency is denoted by the Greek letter (nu) and is found by the formula:
The frequency is measured in 1/s.
Period and frequency are mutually inverse quantities:
If a body moving in a circle with a speed v, makes one revolution, then the path traveled by this body can be found by multiplying the speed v for one turn:
l = vT. On the other hand, this path is equal to the circumference 2π r. So
vT= 2π r,
![]()
where w(from -1) - angular velocity.
At a constant rotation frequency, the centripetal acceleration is directly proportional to the distance from the moving particle to the center of rotation.
Angular velocity (w) is a value equal to the ratio of the angle of rotation of the radius on which the rotating point is located to the time interval during which this rotation occurred:
![]() .
.
Relationship between linear and angular speeds:
The motion of a body can be considered known only when it is known how each of its points moves. The simplest motion of rigid bodies is translational. Translational called the movement of a rigid body, in which any straight line drawn in this body moves parallel to itself.