How to find the modulus of momentum change. Body impulse
Body impulse
The momentum of a body is a quantity equal to the product of the mass of the body and its speed.
It should be remembered that we are talking about a body that can be represented as a material point. The momentum of the body ($p$) is also called the momentum. The concept of momentum was introduced into physics by René Descartes (1596–1650). The term “impulse” appeared later (impulsus in Latin means “push”). Momentum is a vector quantity (like speed) and is expressed by the formula:
$p↖(→)=mυ↖(→)$
The direction of the momentum vector always coincides with the direction of the velocity.
The SI unit of impulse is the impulse of a body with a mass of $1$ kg moving at a speed of $1$ m/s; therefore, the unit of impulse is $1$ kg $·$ m/s.
If a constant force acts on a body (material point) during a period of time $∆t$, then the acceleration will also be constant:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
where $(υ_1)↖(→)$ and $(υ_2)↖(→)$ are the initial and final velocities of the body. Substituting this value into the expression of Newton's second law, we get:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
Opening the brackets and using the expression for the momentum of the body, we have:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
Here $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ is the change in momentum over time $∆t$. Then the previous equation will take the form:
$∆p↖(→)=F↖(→)∆t$
The expression $∆p↖(→)=F↖(→)∆t$ is a mathematical representation of Newton's second law.
The product of a force and the duration of its action is called impulse of force. That's why the change in the momentum of a point is equal to the change in the momentum of the force acting on it.
The expression $∆p↖(→)=F↖(→)∆t$ is called equation of body motion. It should be noted that the same action - a change in the momentum of a point - can be achieved by a small force over a long period of time and by a large force over a short period of time.
Impulse of the system tel. Law of Momentum Change
The impulse (amount of motion) of a mechanical system is a vector equal to the sum of the impulses of all material points of this system:
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
The laws of change and conservation of momentum are a consequence of Newton's second and third laws.
Let us consider a system consisting of two bodies. The forces ($F_(12)$ and $F_(21)$ in the figure with which the bodies of the system interact with each other are called internal.
Let, in addition to internal forces, external forces $(F_1)↖(→)$ and $(F_2)↖(→)$ act on the system. For each body we can write the equation $∆p↖(→)=F↖(→)∆t$. Adding the left and right sides of these equations, we get:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
According to Newton's third law, $(F_(12))↖(→)=-(F_(21))↖(→)$.
Hence,
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
On the left side there is a geometric sum of changes in the impulses of all bodies of the system, equal to the change in the impulse of the system itself - $(∆p_(syst))↖(→)$. Taking this into account, the equality $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ can be written:
$(∆p_(syst))↖(→)=F↖(→)∆t$
where $F↖(→)$ is the sum of all external forces acting on the body. The result obtained means that the momentum of the system can only be changed by external forces, and the change in the momentum of the system is directed in the same way as the total external force. This is the essence of the law of change in momentum of a mechanical system.
Internal forces cannot change the total momentum of the system. They only change the impulses of individual bodies of the system.
Law of conservation of momentum
The law of conservation of momentum follows from the equation $(∆p_(syst))↖(→)=F↖(→)∆t$. If no external forces act on the system, then the right side of the equation $(∆p_(syst))↖(→)=F↖(→)∆t$ becomes zero, which means the total momentum of the system remains unchanged:
$(∆p_(syst))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
A system on which no external forces act or the resultant of external forces is zero is called closed.
The law of conservation of momentum states:
The total momentum of a closed system of bodies remains constant for any interaction of the bodies of the system with each other.
The result obtained is valid for a system containing an arbitrary number of bodies. If the sum of external forces is not equal to zero, but the sum of their projections to some direction is equal to zero, then the projection of the system’s momentum to this direction does not change. So, for example, a system of bodies on the surface of the Earth cannot be considered closed due to the force of gravity acting on all bodies, however, the sum of the projections of impulses on the horizontal direction can remain unchanged (in the absence of friction), since in this direction the force of gravity does not works.
Jet propulsion
Let us consider examples that confirm the validity of the law of conservation of momentum.
Let's take a children's rubber ball, inflate it and release it. We will see that when the air begins to leave it in one direction, the ball itself will fly in the other. The motion of a ball is an example of jet motion. It is explained by the law of conservation of momentum: the total momentum of the “ball plus air in it” system before the air flows out is zero; it must remain equal to zero during movement; therefore, the ball moves in the direction opposite to the direction of flow of the jet, and at such a speed that its momentum is equal in magnitude to the momentum of the air jet.
Jet motion call the movement of a body that occurs when some part of it is separated from it at any speed. Due to the law of conservation of momentum, the direction of movement of the body is opposite to the direction of movement of the separated part.
Rocket flights are based on the principle of jet propulsion. A modern space rocket is a very complex aircraft. The mass of the rocket consists of the mass of the working fluid (i.e., hot gases formed as a result of fuel combustion and emitted in the form of a jet stream) and the final, or, as they say, “dry” mass of the rocket remaining after the working fluid is ejected from the rocket.
When a jet of gas is ejected from a rocket at high speed, the rocket itself rushes in the opposite direction. According to the law of conservation of momentum, the momentum $m_(p)υ_p$ acquired by the rocket must be equal to the momentum $m_(gas)·υ_(gas)$ of the ejected gases:
$m_(p)υ_p=m_(gas)·υ_(gas)$
It follows that the speed of the rocket
$υ_p=((m_(gas))/(m_p))·υ_(gas)$
From this formula it is clear that the greater the speed of the rocket, the greater the speed of the emitted gases and the ratio of the mass of the working fluid (i.e., the mass of the fuel) to the final (“dry”) mass of the rocket.
The formula $υ_p=((m_(gas))/(m_p))·υ_(gas)$ is approximate. It does not take into account that as the fuel burns, the mass of the flying rocket becomes less and less. The exact formula for rocket speed was obtained in 1897 by K. E. Tsiolkovsky and bears his name.
Work of force
The term “work” was introduced into physics in 1826 by the French scientist J. Poncelet. If in everyday life only human labor is called work, then in physics and, in particular, in mechanics it is generally accepted that work is performed by force. The physical quantity of work is usually denoted by the letter $A$.
Work of force is a measure of the action of a force, depending on its magnitude and direction, as well as on the movement of the point of application of the force. For a constant force and linear displacement, the work is determined by the equality:
$A=F|∆r↖(→)|cosα$
where $F$ is the force acting on the body, $∆r↖(→)$ is the displacement, $α$ is the angle between the force and the displacement.

The work of force is equal to the product of the moduli of force and displacement and the cosine of the angle between them, i.e., the scalar product of the vectors $F↖(→)$ and $∆r↖(→)$.
Work is a scalar quantity. If $α 0$, and if $90°
When several forces act on a body, the total work (the sum of the work of all forces) is equal to the work of the resulting force.
The unit of work in SI is joule($1$ J). $1$ J is the work done by a force of $1$ N along a path of $1$ m in the direction of action of this force. This unit is named after the English scientist J. Joule (1818-1889): $1$ J = $1$ N $·$ m. Kilojoules and millijoules are also often used: $1$ kJ $= 1,000$ J, $1$ mJ $= $0.001 J.
Work of gravity
Let us consider a body sliding along an inclined plane with an angle of inclination $α$ and a height $H$.

Let us express $∆x$ in terms of $H$ and $α$:
$∆x=(H)/(sinα)$
Considering that the force of gravity $F_т=mg$ makes an angle ($90° - α$) with the direction of movement, using the formula $∆x=(H)/(sin)α$, we obtain an expression for the work of gravity $A_g$:
$A_g=mg cos(90°-α) (H)/(sinα)=mgH$
From this formula it is clear that the work done by gravity depends on the height and does not depend on the angle of inclination of the plane.
It follows that:
- the work of gravity does not depend on the shape of the trajectory along which the body moves, but only on the initial and final position of the body;
- when a body moves along a closed trajectory, the work done by gravity is zero, i.e., gravity is a conservative force (forces that have this property are called conservative).
Work of reaction forces, is equal to zero, since the reaction force ($N$) is directed perpendicular to the displacement $∆x$.
Work of friction force
The friction force is directed opposite to the displacement $∆x$ and makes an angle of $180°$ with it, therefore the work of the friction force is negative:
$A_(tr)=F_(tr)∆x·cos180°=-F_(tr)·∆x$
Since $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ then
$A_(tr)=μmgHctgα$
Work of elastic force
Let an external force $F↖(→)$ act on an unstretched spring of length $l_0$, stretching it by $∆l_0=x_0$. In position $x=x_0F_(control)=kx_0$. After the force $F↖(→)$ ceases to act at point $x_0$, the spring is compressed under the action of force $F_(control)$.

Let us determine the work of the elastic force when the coordinate of the right end of the spring changes from $x_0$ to $x$. Since the elastic force in this area changes linearly, Hooke’s law can use its average value in this area:
$F_(control av.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
Then the work (taking into account the fact that the directions $(F_(control av.))↖(→)$ and $(∆x)↖(→)$ coincide) is equal to:
$A_(control)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
It can be shown that the form of the last formula does not depend on the angle between $(F_(control av.))↖(→)$ and $(∆x)↖(→)$. The work of elastic forces depends only on the deformations of the spring in the initial and final states.
Thus, the elastic force, like the force of gravity, is a conservative force.
Power power
Power is a physical quantity measured by the ratio of work to the period of time during which it is produced.
In other words, power shows how much work is done per unit of time (in SI - per $1$ s).
Power is determined by the formula:
where $N$ is power, $A$ is work done during time $∆t$.
Substituting into the formula $N=(A)/(∆t)$ instead of the work $A$ its expression $A=F|(∆r)↖(→)|cosα$, we obtain:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
Power is equal to the product of the magnitudes of the force and velocity vectors and the cosine of the angle between these vectors.
Power in the SI system is measured in watts (W). One watt ($1$ W) is the power at which $1$ J of work is done for $1$ s: $1$ W $= 1$ J/s.
This unit is named after the English inventor J. Watt (Watt), who built the first steam engine. J. Watt himself (1736-1819) used another unit of power - horsepower (hp), which he introduced so that he could compare the performance of a steam engine and a horse: $1$ hp. $= 735.5$ W.
In technology, larger power units are often used - kilowatt and megawatt: $1$ kW $= 1000$ W, $1$ MW $= 1000000$ W.
Kinetic energy. Law of change of kinetic energy
If a body or several interacting bodies (a system of bodies) can do work, then they are said to have energy.
The word “energy” (from the Greek energia - action, activity) is often used in everyday life. For example, people who can do work quickly are called energetic, having great energy.
The energy possessed by a body due to motion is called kinetic energy.
As in the case of the definition of energy in general, we can say about kinetic energy that kinetic energy is the ability of a moving body to do work.
Let us find the kinetic energy of a body of mass $m$ moving with a speed $υ$. Since kinetic energy is energy due to motion, its zero state is the state in which the body is at rest. Having found the work necessary to impart a given speed to a body, we will find its kinetic energy.
To do this, let’s calculate the work in the area of displacement $∆r↖(→)$ when the directions of the force vectors $F↖(→)$ and displacement $∆r↖(→)$ coincide. In this case the work is equal
where $∆x=∆r$

For the motion of a point with acceleration $α=const$, the expression for displacement has the form:
$∆x=υ_1t+(at^2)/(2),$
where $υ_1$ is the initial speed.
Substituting into the equation $A=F·∆x$ the expression for $∆x$ from $∆x=υ_1t+(at^2)/(2)$ and using Newton’s second law $F=ma$, we obtain:
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
Expressing the acceleration through the initial $υ_1$ and final $υ_2$ velocities $a=(υ_2-υ_1)/(t)$ and substituting in $A=ma(υ_1t+(at^2)/(2))=(mat)/ (2)(2υ_1+at)$ we have:
$A=(m(υ_2-υ_1))/(2)·(2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
Now equating the initial speed to zero: $υ_1=0$, we obtain an expression for kinetic energy:
$E_K=(mυ)/(2)=(p^2)/(2m)$
Thus, a moving body has kinetic energy. This energy is equal to the work that must be done to increase the speed of the body from zero to the value $υ$.
From $E_K=(mυ)/(2)=(p^2)/(2m)$ it follows that the work done by a force to move a body from one position to another is equal to the change in kinetic energy:
$A=E_(K_2)-E_(K_1)=∆E_K$
The equality $A=E_(K_2)-E_(K_1)=∆E_K$ expresses theorem on the change in kinetic energy.
Change in body kinetic energy(material point) for a certain period of time is equal to the work done during this time by the force acting on the body.
Potential energy
Potential energy is the energy determined by the relative position of interacting bodies or parts of the same body.
Since energy is defined as the ability of a body to do work, potential energy is naturally defined as the work done by a force, depending only on the relative position of the bodies. This is the work of gravity $A=mgh_1-mgh_2=mgH$ and the work of elasticity:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
Potential energy of the body interacting with the Earth, they call a quantity equal to the product of the mass $m$ of this body by the acceleration of free fall $g$ and the height $h$ of the body above the Earth's surface:
The potential energy of an elastically deformed body is a value equal to half the product of the elasticity (stiffness) coefficient $k$ of the body and the squared deformation $∆l$:
$E_p=(1)/(2)k∆l^2$
The work of conservative forces (gravity and elasticity), taking into account $E_p=mgh$ and $E_p=(1)/(2)k∆l^2$, is expressed as follows:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
This formula allows us to give a general definition of potential energy.
The potential energy of a system is a quantity that depends on the position of the bodies, the change in which during the transition of the system from the initial state to the final state is equal to the work of the internal conservative forces of the system, taken with the opposite sign.
The minus sign on the right side of the equation $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ means that when work is performed by internal forces (for example, a fall bodies on the ground under the influence of gravity in the “rock-Earth” system), the energy of the system decreases. Work and changes in potential energy in a system always have opposite signs.
Since work determines only a change in potential energy, then only a change in energy has a physical meaning in mechanics. Therefore, the choice of the zero energy level is arbitrary and determined solely by considerations of convenience, for example, the ease of writing the corresponding equations.
Law of change and conservation of mechanical energy
Total mechanical energy of the system the sum of its kinetic and potential energies is called:
It is determined by the position of bodies (potential energy) and their speed (kinetic energy).
According to the kinetic energy theorem,
$E_k-E_(k_1)=A_p+A_(pr),$
where $A_p$ is the work of potential forces, $A_(pr)$ is the work of non-potential forces.
In turn, the work of potential forces is equal to the difference in the potential energy of the body in the initial $E_(p_1)$ and final $E_p$ states. Taking this into account, we obtain an expression for law of change of mechanical energy:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
where the left side of the equality is the change in total mechanical energy, and the right side is the work of non-potential forces.
So, law of change of mechanical energy reads:
The change in the mechanical energy of the system is equal to the work of all non-potential forces.
A mechanical system in which only potential forces act is called conservative.
In a conservative system $A_(pr) = 0$. this implies law of conservation of mechanical energy:
In a closed conservative system, the total mechanical energy is conserved (does not change with time):
$E_k+E_p=E_(k_1)+E_(p_1)$
The law of conservation of mechanical energy is derived from Newton's laws of mechanics, which are applicable to a system of material points (or macroparticles).
However, the law of conservation of mechanical energy is also valid for a system of microparticles, where Newton’s laws themselves no longer apply.
The law of conservation of mechanical energy is a consequence of the uniformity of time.
Uniformity of time is that, under the same initial conditions, the occurrence of physical processes does not depend on at what point in time these conditions are created.
The law of conservation of total mechanical energy means that when the kinetic energy in a conservative system changes, its potential energy must also change, so that their sum remains constant. This means the possibility of converting one type of energy into another.
In accordance with the various forms of motion of matter, various types of energy are considered: mechanical, internal (equal to the sum of the kinetic energy of the chaotic movement of molecules relative to the center of mass of the body and the potential energy of interaction of molecules with each other), electromagnetic, chemical (which consists of the kinetic energy of the movement of electrons and electrical the energy of their interaction with each other and with atomic nuclei), nuclear, etc. From the above it is clear that the division of energy into different types is quite arbitrary.
Natural phenomena are usually accompanied by the transformation of one type of energy into another. For example, friction of parts of various mechanisms leads to the conversion of mechanical energy into heat, i.e. internal energy. In heat engines, on the contrary, internal energy is converted into mechanical energy; in galvanic cells, chemical energy is converted into electrical energy, etc.
Currently, the concept of energy is one of the basic concepts of physics. This concept is inextricably linked with the idea of the transformation of one form of movement into another.
This is how the concept of energy is formulated in modern physics:
Energy is a general quantitative measure of movement and interaction of all types of matter. Energy does not appear from nothing and does not disappear, it can only move from one form to another. The concept of energy links together all natural phenomena.
Simple mechanisms. Mechanism efficiency
Simple mechanisms are devices that change the magnitude or direction of forces applied to a body.
They are used to move or lift large loads with little effort. These include the lever and its varieties - blocks (movable and fixed), gates, inclined plane and its varieties - wedge, screw, etc.
Lever arm. Leverage rule
A lever is a rigid body capable of rotating around a fixed support.

The rule of leverage says:
A lever is in equilibrium if the forces applied to it are inversely proportional to their arms:
$(F_2)/(F_1)=(l_1)/(l_2)$
From the formula $(F_2)/(F_1)=(l_1)/(l_2)$, applying the property of proportion to it (the product of the extreme terms of a proportion is equal to the product of its middle terms), we can obtain the following formula:
But $F_1l_1=M_1$ is the moment of force tending to turn the lever clockwise, and $F_2l_2=M_2$ is the moment of force trying to turn the lever counterclockwise. Thus, $M_1=M_2$, which is what needed to be proven.
The lever began to be used by people in ancient times. With its help, it was possible to lift heavy stone slabs during the construction of pyramids in Ancient Egypt. Without leverage this would not be possible. After all, for example, for the construction of the Cheops pyramid, which has a height of $147$ m, more than two million stone blocks were used, the smallest of which weighed $2.5$ tons!
Nowadays, levers are widely used both in production (for example, cranes) and in everyday life (scissors, wire cutters, scales).
Fixed block
The action of a fixed block is similar to the action of a lever with equal arms: $l_1=l_2=r$. The applied force $F_1$ is equal to the load $F_2$, and the equilibrium condition is:
Fixed block used when you need to change the direction of a force without changing its magnitude.
Movable block
The moving block acts similarly to a lever, the arms of which are: $l_2=(l_1)/(2)=r$. In this case, the equilibrium condition has the form:
where $F_1$ is the applied force, $F_2$ is the load. The use of a moving block gives a double gain in strength.
Pulley hoist (block system)
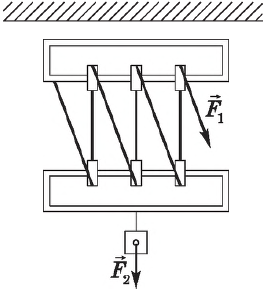
A conventional chain hoist consists of $n$ moving and $n$ fixed blocks. Using it gives a gain in strength of $2n$ times:
$F_1=(F_2)/(2n)$
Power chain hoist consists of n movable and one fixed block. The use of a power pulley gives a gain in strength of $2^n$ times:
$F_1=(F_2)/(2^n)$

Screw
A screw is an inclined plane wound around an axis.
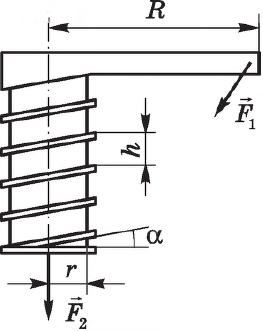
The equilibrium condition for the forces acting on the propeller has the form:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

where $F_1$ is the external force applied to the propeller and acting at a distance $R$ from its axis; $F_2$ is the force acting in the direction of the propeller axis; $h$ — propeller pitch; $r$ is the average thread radius; $α$ is the angle of inclination of the thread. $R$ is the length of the lever (wrench) rotating the screw with a force of $F_1$.
Efficiency
Coefficient of efficiency (efficiency) is the ratio of useful work to all work expended.
Efficiency is often expressed as a percentage and is denoted by the Greek letter $η$ (“this”):
$η=(A_p)/(A_3)·100%$
where $A_n$ is useful work, $A_3$ is all expended work.
Useful work always constitutes only a part of the total work that a person expends using one or another mechanism.
Part of the work done is spent on overcoming frictional forces. Since $A_3 > A_n$, the efficiency is always less than $1$ (or $< 100%$).
Since each of the works in this equality can be expressed as a product of the corresponding force and the distance traveled, it can be rewritten as follows: $F_1s_1≈F_2s_2$.
It follows that, winning with the help of a mechanism in force, we lose the same number of times along the way, and vice versa. This law is called the golden rule of mechanics.
The golden rule of mechanics is an approximate law, since it does not take into account the work of overcoming friction and gravity of the parts of the devices used. Nevertheless, it can be very useful in analyzing the operation of any simple mechanism.

So, for example, thanks to this rule, we can immediately say that the worker shown in the figure, with a double gain in the force of lifting the load by $10$ cm, will have to lower the opposite end of the lever by $20$ cm.
Collision of bodies. Elastic and inelastic impacts
The laws of conservation of momentum and mechanical energy are used to solve the problem of the motion of bodies after a collision: from the known impulses and energies before the collision, the values of these quantities after the collision are determined. Let us consider the cases of elastic and inelastic impacts.
An impact is called absolutely inelastic, after which the bodies form a single body moving at a certain speed. The problem of the speed of the latter is solved using the law of conservation of momentum of a system of bodies with masses $m_1$ and $m_2$ (if we are talking about two bodies) before and after the impact:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
It is obvious that the kinetic energy of bodies during an inelastic impact is not conserved (for example, for $(υ_1)↖(→)=-(υ_2)↖(→)$ and $m_1=m_2$ it becomes equal to zero after the impact).
An impact in which not only the sum of impulses is conserved, but also the sum of the kinetic energies of the impacting bodies is called absolutely elastic.
For an absolutely elastic impact, the following equations are valid:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2 )^2)/(2)$
where $m_1, m_2$ are the masses of the balls, $υ_1, υ_2$ are the velocities of the balls before the impact, $υ"_1, υ"_2$ are the velocities of the balls after the impact.
Details Category: Mechanics Published 04/21/2014 14:29 Views: 53533In classical mechanics, there are two conservation laws: the law of conservation of momentum and the law of conservation of energy.
Body impulse

The concept of momentum was first introduced by a French mathematician, physicist, and mechanic. and the philosopher Descartes, who called impulse amount of movement .
From Latin, “impulse” is translated as “push, move.”
Any body that moves has momentum.
Let's imagine a cart standing still. Its momentum is zero. But as soon as the cart starts moving, its momentum will no longer be zero. It will begin to change as the speed changes.
Momentum of a material point, or amount of movement – a vector quantity equal to the product of the mass of a point and its speed. The direction of the point's momentum vector coincides with the direction of the velocity vector.
If we are talking about a solid physical body, then the momentum of such a body is called the product of the mass of this body and the speed of the center of mass.
How to calculate the momentum of a body? One can imagine that a body consists of many material points, or a system of material points.
If - the impulse of one material point, then the impulse of a system of material points
![]()
That is, momentum of a system of material points is the vector sum of the momenta of all material points included in the system. It is equal to the product of the masses of these points and their speed.
The unit of impulse in the International System of Units (SI) is kilogram-meter per second (kg m/sec).
Impulse force

In mechanics, there is a close connection between the momentum of a body and force. These two quantities are connected by a quantity called impulse of force .
If a constant force acts on a bodyF over a period of time t , then according to Newton's second law
![]()
![]()
This formula shows the relationship between the force that acts on the body, the time of action of this force and the change in the speed of the body.
The quantity equal to the product of the force acting on a body and the time during which it acts is called impulse of force .
As we see from the equation, the impulse of force is equal to the difference in the impulses of the body at the initial and final moments of time, or the change in impulse over some time.
Newton's second law in momentum form is formulated as follows: the change in the momentum of a body is equal to the momentum of the force acting on it. It must be said that Newton himself originally formulated his law in exactly this way.
Force impulse is also a vector quantity.

The law of conservation of momentum follows from Newton's third law.
It must be remembered that this law operates only in a closed, or isolated, physical system. A closed system is a system in which bodies interact only with each other and do not interact with external bodies.
Let us imagine a closed system of two physical bodies. The forces of interaction of bodies with each other are called internal forces.
The force impulse for the first body is equal to
According to Newton's third law, the forces that act on bodies during their interaction are equal in magnitude and opposite in direction.
Therefore, for the second body the momentum of the force is equal to
By simple calculations we obtain a mathematical expression for the law of conservation of momentum:
Where m 1 And m 2 – body masses,
v 1 And v 2 – velocities of the first and second bodies before interaction,
v 1" And v 2" – velocities of the first and second bodies after interaction .
p 1 = m 1 · v 1 - momentum of the first body before interaction;
p 2 = m 2 · v 2 - momentum of the second body before interaction;
p 1 "= m 1 · v 1" - momentum of the first body after interaction;
p 2 "= m 2 · v 2" - momentum of the second body after interaction;
That is
p 1 + p 2 = p 1" + p 2"
In a closed system, bodies only exchange impulses. And the vector sum of the momenta of these bodies before their interaction is equal to the vector sum of their momenta after the interaction.
So, as a result of firing a gun, the momentum of the gun itself and the momentum of the bullet will change. But the sum of the impulses of the gun and the bullet in it before the shot will remain equal to the sum of the impulses of the gun and the flying bullet after the shot.
When firing a cannon, there is recoil. The projectile flies forward, and the gun itself rolls back. The projectile and the gun are a closed system in which the law of conservation of momentum operates.
The momentum of each body in a closed system can change as a result of their interaction with each other. But the vector sum of the impulses of bodies included in a closed system does not change when these bodies interact over time, that is, it remains constant. That's what it is law of conservation of momentum.
More precisely, the law of conservation of momentum is formulated as follows: the vector sum of the impulses of all bodies of a closed system is a constant value if there are no external forces acting on it, or their vector sum is equal to zero.
The momentum of a system of bodies can change only as a result of the action of external forces on the system. And then the law of conservation of momentum will not apply.
It must be said that closed systems do not exist in nature. But, if the time of action of external forces is very short, for example, during an explosion, shot, etc., then in this case the influence of external forces on the system is neglected, and the system itself is considered as closed.
In addition, if external forces act on the system, but the sum of their projections onto one of the coordinate axes is zero (that is, the forces are balanced in the direction of this axis), then the law of conservation of momentum is satisfied in this direction.
The law of conservation of momentum is also called law of conservation of momentum .
The most striking example of the application of the law of conservation of momentum is jet motion.
Jet propulsion

Reactive motion is the movement of a body that occurs when some part of it is separated from it at a certain speed. The body itself receives an oppositely directed impulse.
The simplest example of jet propulsion is the flight of a balloon from which air escapes. If we inflate a balloon and release it, it will begin to fly in the direction opposite to the movement of the air coming out of it.
An example of jet propulsion in nature is the release of liquid from the fruit of a crazy cucumber when it bursts. At the same time, the cucumber itself flies in the opposite direction.
Jellyfish, cuttlefish and other inhabitants of the deep sea move by taking in water and then throwing it out.
Jet thrust is based on the law of conservation of momentum. We know that when a rocket with a jet engine moves, as a result of fuel combustion, a jet of liquid or gas is ejected from the nozzle ( jet stream ). As a result of the interaction of the engine with the escaping substance, Reactive force . Since the rocket, together with the emitted substance, is a closed system, the momentum of such a system does not change with time.
Reactive force arises from the interaction of only parts of the system. External forces have no influence on its appearance.
Before the rocket began to move, the sum of the impulses of the rocket and the fuel was zero. Consequently, according to the law of conservation of momentum, after the engines are turned on, the sum of these impulses is also zero.
where is the mass of the rocket
Gas flow rate
Changing rocket speed
∆mf - fuel consumption
Suppose the rocket operated for a period of time t .
Dividing both sides of the equation by ∆ t, we get the expression
![]()
According to Newton's second law, the reactive force is equal to
![]()
Reaction force, or jet thrust, ensures the movement of the jet engine and the object associated with it in the direction opposite to the direction of the jet stream.
Jet engines are used in modern aircraft and various missiles, military, space, etc.
Impulse(quantity of motion) of a body is a physical vector quantity, which is a quantitative characteristic of the translational motion of bodies. The impulse is designated R. The momentum of a body is equal to the product of the mass of the body and its speed, i.e. it is calculated by the formula:
The direction of the impulse vector coincides with the direction of the body's velocity vector (directed tangent to the trajectory). The impulse unit is kg∙m/s.
Total momentum of a system of bodies equals vector the sum of the impulses of all bodies in the system:
Change in momentum of one body is found by the formula (note that the difference between the final and initial impulses is vector):
![]()
Where: p n – body impulse at the initial moment of time, p k – to the final one. The main thing is not to confuse the last two concepts.
Absolutely elastic impact– an abstract model of impact, which does not take into account energy losses due to friction, deformation, etc. No other interactions other than direct contact are taken into account. With an absolutely elastic impact on a fixed surface, the speed of the object after the impact is equal in magnitude to the speed of the object before the impact, that is, the magnitude of the impulse does not change. Only its direction can change. In this case, the angle of incidence is equal to the angle of reflection.
Absolutely inelastic impact- a blow, as a result of which the bodies connect and continue their further movement as a single body. For example, when a plasticine ball falls on any surface, it completely stops its movement; when two cars collide, the automatic coupler is activated and they also continue to move further together.
Law of conservation of momentum
When bodies interact, the impulse of one body can be partially or completely transferred to another body. If a system of bodies is not acted upon by external forces from other bodies, such a system is called closed.
In a closed system, the vector sum of the impulses of all bodies included in the system remains constant for any interactions of the bodies of this system with each other. This fundamental law of nature is called law of conservation of momentum (LCM). Its consequences are Newton's laws. Newton's second law in momentum form can be written as follows:
As follows from this formula, if there is no external force acting on a system of bodies, or the action of external forces is compensated (the resultant force is zero), then the change in momentum is zero, which means that the total momentum of the system is conserved:
Similarly, one can reason for the equality of the projection of force on the selected axis to zero. If external forces do not act only along one of the axes, then the projection of the momentum onto this axis is preserved, for example:
Similar records can be made for other coordinate axes. One way or another, you need to understand that the impulses themselves can change, but it is their sum that remains constant. The law of conservation of momentum in many cases makes it possible to find the velocities of interacting bodies even when the values of the acting forces are unknown.
Saving momentum projection
Situations are possible when the law of conservation of momentum is only partially satisfied, that is, only when projecting onto one axis. If a force acts on a body, then its momentum is not conserved. But you can always choose an axis so that the projection of force on this axis is equal to zero. Then the projection of the impulse onto this axis will be preserved. As a rule, this axis is chosen along the surface along which the body moves.
Multidimensional case of FSI. Vector method
In cases where bodies do not move along one straight line, then in the general case, in order to apply the law of conservation of momentum, it is necessary to describe it along all coordinate axes involved in the problem. But solving such a problem can be greatly simplified if you use the vector method. It is used if one of the bodies is at rest before or after the impact. Then the law of conservation of momentum is written in one of the following ways:

From the rules for adding vectors it follows that the three vectors in these formulas must form a triangle. For triangles, the cosine theorem applies.
- Back
- Forward
How to successfully prepare for the CT in physics and mathematics?
In order to successfully prepare for the CT in physics and mathematics, among other things, it is necessary to fulfill three most important conditions:
- Study all topics and complete all tests and assignments given in the educational materials on this site. To do this, you need nothing at all, namely: devote three to four hours every day to preparing for the CT in physics and mathematics, studying theory and solving problems. The fact is that the CT is an exam where it is not enough just to know physics or mathematics, you also need to be able to quickly and without failures solve a large number of problems on different topics and of varying complexity. The latter can only be learned by solving thousands of problems.
- Learn all the formulas and laws in physics, and formulas and methods in mathematics. In fact, this is also very simple to do; there are only about 200 necessary formulas in physics, and even a little less in mathematics. In each of these subjects there are about a dozen standard methods for solving problems of a basic level of complexity, which can also be learned, and thus, completely automatically and without difficulty solving most of the CT at the right time. After this, you will only have to think about the most difficult tasks.
- Attend all three stages of rehearsal testing in physics and mathematics. Each RT can be visited twice to decide on both options. Again, on the CT, in addition to the ability to quickly and efficiently solve problems, and knowledge of formulas and methods, you must also be able to properly plan time, distribute forces, and most importantly, correctly fill out the answer form, without confusing the numbers of answers and problems, or your own last name. Also, during RT, it is important to get used to the style of asking questions in problems, which may seem very unusual to an unprepared person at the DT.
Successful, diligent and responsible implementation of these three points will allow you to show an excellent result at the CT, the maximum of what you are capable of.
Found a mistake?
If you think you have found an error in the training materials, please write about it by email. You can also report an error on the social network (). In the letter, indicate the subject (physics or mathematics), the name or number of the topic or test, the number of the problem, or the place in the text (page) where, in your opinion, there is an error. Also describe what the suspected error is. Your letter will not go unnoticed, the error will either be corrected, or you will be explained why it is not an error.
Let the body mass m for some short period of time Δ t force acted Under the influence of this force, the speed of the body changed by ![]() Therefore, during the time Δ t the body moved with acceleration
Therefore, during the time Δ t the body moved with acceleration

From the basic law of dynamics ( Newton's second law) follows:

A physical quantity equal to the product of the mass of a body and the speed of its movement is called body impulse(or amount of movement). The momentum of a body is a vector quantity. The SI unit of impulse is kilogram meter per second (kg m/s).
A physical quantity equal to the product of a force and the time of its action is called impulse of force . Force impulse is also a vector quantity.
In new terms Newton's second law can be formulated as follows:
ANDThe change in the momentum of the body (amount of motion) is equal to the impulse of force.
Denoting the momentum of a body with a letter, Newton’s second law can be written in the form
![]()
It was in this general form that Newton himself formulated the second law. The force in this expression represents the resultant of all forces applied to the body. This vector equality can be written in projections onto the coordinate axes:
Thus, the change in the projection of the body's momentum onto any of the three mutually perpendicular axes is equal to the projection of the force impulse onto the same axis. Let's take as an example one-dimensional movement, i.e. the movement of a body along one of the coordinate axes (for example, the axis OY). Let the body fall freely with an initial speed v 0 under the influence of gravity; the falling time is t. Let's direct the axis OY vertically down. Gravity impulse F t = mg during t equals mgt. This impulse is equal to the change in the momentum of the body
This simple result coincides with the kinematicformulafor speed of uniformly accelerated motion. In this example, the force remained unchanged in magnitude throughout the entire time interval t. If the force changes in magnitude, then the average value of the force must be substituted into the expression for the impulse of force F cf over the period of time of its action. Rice. 1.16.1 illustrates the method for determining the time-dependent force impulse.
Let us choose a small interval Δ on the time axis t, during which the force F (t) remains virtually unchanged. Impulse force F (t) Δ t in time Δ t will be equal to the area of the shaded column. If the entire time axis is in the interval from 0 to t split into small intervals Δ ti, and then sum the force impulses at all intervals Δ ti, then the total impulse of force will be equal to the area formed by the stepped curve with the time axis. In the limit (Δ ti→ 0) this area is equal to the area limited by the graph F (t) and axis t. This method of determining the force impulse from a graph F (t) is general and applicable to any laws of force change over time. Mathematically, the problem reduces to integration functions F (t) on the interval .
The force impulse, the graph of which is presented in Fig. 1.16.1, in the interval from t 1 = 0 s to t 2 = 10 s is equal to:
In this simple example
![]()
In some cases, medium strength F cp can be determined if the time of its action and the impulse imparted to the body are known. For example, a strong hit by a football player on a ball with a mass of 0.415 kg can give him a speed of υ = 30 m/s. The impact time is approximately 8·10 –3 s.
Pulse p, acquired by the ball as a result of a strike is:
Therefore, the average force F the average with which the football player’s foot acted on the ball during the kick is:
![]()
This is a very big power. It is approximately equal to the weight of a body weighing 160 kg.
If the movement of a body during the action of a force occurred along a certain curvilinear trajectory, then the initial and final impulses of the body may differ not only in magnitude, but also in direction. In this case, to determine the change in momentum it is convenient to use pulse diagram
, which depicts the vectors and , as well as the vector ![]() built according to the parallelogram rule. As an example in Fig. Figure 1.16.2 shows a diagram of impulses for a ball bouncing off a rough wall. Ball mass m hit the wall with a speed at an angle α to the normal (axis OX) and bounced off it with a speed at an angle β. During contact with the wall, a certain force acted on the ball, the direction of which coincides with the direction of the vector
built according to the parallelogram rule. As an example in Fig. Figure 1.16.2 shows a diagram of impulses for a ball bouncing off a rough wall. Ball mass m hit the wall with a speed at an angle α to the normal (axis OX) and bounced off it with a speed at an angle β. During contact with the wall, a certain force acted on the ball, the direction of which coincides with the direction of the vector
During a normal fall of a ball with a mass m on an elastic wall with speed, after the rebound the ball will have speed. Therefore, the change in momentum of the ball during the rebound is equal to ![]()
In projections onto the axis OX this result can be written in scalar form Δ px = –2mυ x. Axis OX directed away from the wall (as in Fig. 1.16.2), therefore υ x < 0 и Δpx> 0. Therefore, the module Δ p the change in momentum is related to the modulus υ of the ball speed by the relation Δ p = 2mυ.
His movements, i.e. size .
Pulse is a vector quantity coinciding in direction with the velocity vector.
SI unit of impulse: kg m/s .
The momentum of a system of bodies is equal to the vector sum of the momentum of all bodies included in the system:
Law of conservation of momentum
If the system of interacting bodies is additionally acted upon by external forces, for example, then in this case the relation is valid, which is sometimes called the law of momentum change:

For a closed system (in the absence of external forces), the law of conservation of momentum is valid:
The action of the law of conservation of momentum can explain the phenomenon of recoil when shooting from a rifle or during artillery shooting. Also, the law of conservation of momentum underlies the operating principle of all jet engines.
When solving physical problems, the law of conservation of momentum is used when knowledge of all the details of the movement is not required, but the result of the interaction of bodies is important. Such problems, for example, are problems about the impact or collision of bodies. The law of conservation of momentum is used when considering the motion of bodies of variable mass such as launch vehicles. Most of the mass of such a rocket is fuel. During the active phase of the flight, this fuel burns out, and the mass of the rocket in this part of the trajectory quickly decreases. Also, the law of conservation of momentum is necessary in cases where the concept is not applicable. It is difficult to imagine a situation where a stationary body acquires a certain speed instantly. In normal practice, bodies always accelerate and gain speed gradually. However, when electrons and other subatomic particles move, their state changes abruptly without remaining in intermediate states. In such cases, the classical concept of “acceleration” cannot be applied.
Examples of problem solving
EXAMPLE 1
| Exercise | A projectile weighing 100 kg, flying horizontally along a railway track at a speed of 500 m/s, hits a car with sand weighing 10 tons and gets stuck in it. What speed will the car get if it moved at a speed of 36 km/h in the direction opposite to the movement of the projectile? |
| Solution | The car + projectile system is closed, so in this case the law of conservation of momentum can be applied. Let's make a drawing, indicating the state of the bodies before and after the interaction.
When the projectile and the car interact, an inelastic impact occurs. The law of conservation of momentum in this case will be written as: Choosing the direction of the axis to coincide with the direction of movement of the car, we write the projection of this equation onto the coordinate axis: where does the speed of the car come from after a projectile hits it:
We convert the units to the SI system: t kg. Let's calculate: |
| Answer | After the shell hits, the car will move at a speed of 5 m/s. |


EXAMPLE 2
| Exercise | A projectile weighing m=10 kg had a speed v=200 m/s at the top point. At this point it broke into two parts. The smaller part with a mass m 1 =3 kg received a speed v 1 =400 m/s in the same direction at an angle to the horizontal. At what speed and in what direction will most of the projectile fly? |
| Solution | The trajectory of the projectile is a parabola. The speed of the body is always directed tangentially to the trajectory. At the top point of the trajectory, the velocity of the projectile is parallel to the axis.
Let's write down the law of conservation of momentum: Let's move from vectors to scalar quantities. To do this, let’s square both sides of the vector equality and use the formulas for: Taking into account that , and also that , we find the speed of the second fragment: Substituting the numerical values of physical quantities into the resulting formula, we calculate: We determine the flight direction of most of the projectile using:
Substituting numerical values into the formula, we get: |
| Answer | Most of the projectile will fly down at a speed of 249 m/s at an angle to the horizontal direction. |



EXAMPLE 3
| Exercise | The mass of the train is 3000 tons. The friction coefficient is 0.02. What type of locomotive must be in order for the train to reach a speed of 60 km/h 2 minutes after the start of movement? |
| Solution | Since the train is acted upon by (an external force), the system cannot be considered closed, and the law of conservation of momentum is not satisfied in this case. Let's use the law of momentum change: Since the friction force is always directed in the direction opposite to the movement of the body, the friction force impulse will enter the projection of the equation onto the coordinate axis (the direction of the axis coincides with the direction of motion of the train) with a “minus” sign: |