ಆವೇಗ ಬದಲಾವಣೆಯ ಮಾಡ್ಯುಲಸ್ ಅನ್ನು ಹೇಗೆ ಕಂಡುಹಿಡಿಯುವುದು. ದೇಹದ ಪ್ರಚೋದನೆ
ದೇಹದ ಪ್ರಚೋದನೆ
ದೇಹದ ಆವೇಗವು ದೇಹದ ದ್ರವ್ಯರಾಶಿ ಮತ್ತು ಅದರ ವೇಗದ ಉತ್ಪನ್ನಕ್ಕೆ ಸಮಾನವಾದ ಪ್ರಮಾಣವಾಗಿದೆ.
ನಾವು ವಸ್ತು ಬಿಂದುವಾಗಿ ಪ್ರತಿನಿಧಿಸಬಹುದಾದ ದೇಹದ ಬಗ್ಗೆ ಮಾತನಾಡುತ್ತಿದ್ದೇವೆ ಎಂದು ನೆನಪಿನಲ್ಲಿಡಬೇಕು. ದೇಹದ ಆವೇಗವನ್ನು ($p$) ಆವೇಗ ಎಂದೂ ಕರೆಯುತ್ತಾರೆ. ಆವೇಗದ ಪರಿಕಲ್ಪನೆಯನ್ನು ಭೌತಶಾಸ್ತ್ರದಲ್ಲಿ ರೆನೆ ಡೆಸ್ಕಾರ್ಟೆಸ್ (1596-1650) ಪರಿಚಯಿಸಿದರು. "ಪ್ರಚೋದನೆ" ಎಂಬ ಪದವು ನಂತರ ಕಾಣಿಸಿಕೊಂಡಿತು (ಲ್ಯಾಟಿನ್ ಭಾಷೆಯಲ್ಲಿ ಇಂಪಲ್ಸಸ್ ಎಂದರೆ "ಪುಶ್"). ಮೊಮೆಂಟಮ್ ಒಂದು ವೆಕ್ಟರ್ ಪ್ರಮಾಣವಾಗಿದೆ (ವೇಗದಂತೆ) ಮತ್ತು ಇದನ್ನು ಸೂತ್ರದಿಂದ ವ್ಯಕ್ತಪಡಿಸಲಾಗುತ್ತದೆ:
$p↖(→)=mυ↖(→)$
ಆವೇಗ ವೆಕ್ಟರ್ನ ದಿಕ್ಕು ಯಾವಾಗಲೂ ವೇಗದ ದಿಕ್ಕಿನೊಂದಿಗೆ ಹೊಂದಿಕೆಯಾಗುತ್ತದೆ.
ಪ್ರಚೋದನೆಯ SI ಘಟಕವು $1$ ಕೆಜಿ ದ್ರವ್ಯರಾಶಿಯೊಂದಿಗೆ $1$ m/s ವೇಗದಲ್ಲಿ ಚಲಿಸುವ ದೇಹದ ಪ್ರಚೋದನೆಯಾಗಿದೆ; ಆದ್ದರಿಂದ, ಉದ್ವೇಗದ ಘಟಕವು $1$ kg $·$ m/s ಆಗಿದೆ.
$∆t$ ಅವಧಿಯಲ್ಲಿ ಸ್ಥಿರ ಶಕ್ತಿಯು ದೇಹದ ಮೇಲೆ (ವಸ್ತು ಬಿಂದು) ಕಾರ್ಯನಿರ್ವಹಿಸಿದರೆ, ವೇಗವರ್ಧನೆಯು ಸ್ಥಿರವಾಗಿರುತ್ತದೆ:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
ಇಲ್ಲಿ $(υ_1)↖(→)$ ಮತ್ತು $(υ_2)↖(→)$ ಇವು ದೇಹದ ಆರಂಭಿಕ ಮತ್ತು ಅಂತಿಮ ವೇಗಗಳಾಗಿವೆ. ಈ ಮೌಲ್ಯವನ್ನು ನ್ಯೂಟನ್ನ ಎರಡನೇ ನಿಯಮದ ಅಭಿವ್ಯಕ್ತಿಗೆ ಬದಲಿಸಿ, ನಾವು ಪಡೆಯುತ್ತೇವೆ:
$(m((υ_2)↖(→)-(υ_1)↖(→))/(∆t)=F↖(→)$
ಬ್ರಾಕೆಟ್ಗಳನ್ನು ತೆರೆಯುವುದು ಮತ್ತು ದೇಹದ ಆವೇಗಕ್ಕಾಗಿ ಅಭಿವ್ಯಕ್ತಿಯನ್ನು ಬಳಸುವುದು, ನಾವು ಹೊಂದಿದ್ದೇವೆ:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
ಇಲ್ಲಿ $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ ಎಂಬುದು ಕಾಲಾನಂತರದಲ್ಲಿ $∆t$ ಆಗುವ ಆವೇಗದಲ್ಲಿನ ಬದಲಾವಣೆಯಾಗಿದೆ. ನಂತರ ಹಿಂದಿನ ಸಮೀಕರಣವು ರೂಪವನ್ನು ತೆಗೆದುಕೊಳ್ಳುತ್ತದೆ:
$∆p↖(→)=F↖(→)∆t$
$∆p↖(→)=F↖(→)∆t$ ಎಂಬ ಅಭಿವ್ಯಕ್ತಿ ನ್ಯೂಟನ್ನ ಎರಡನೇ ನಿಯಮದ ಗಣಿತದ ನಿರೂಪಣೆಯಾಗಿದೆ.
ಬಲದ ಉತ್ಪನ್ನ ಮತ್ತು ಅದರ ಕ್ರಿಯೆಯ ಅವಧಿಯನ್ನು ಕರೆಯಲಾಗುತ್ತದೆ ಬಲದ ಪ್ರಚೋದನೆ. ಅದಕ್ಕೇ ಬಿಂದುವಿನ ಆವೇಗದಲ್ಲಿನ ಬದಲಾವಣೆಯು ಅದರ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಬಲದ ಆವೇಗದಲ್ಲಿನ ಬದಲಾವಣೆಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
$∆p↖(→)=F↖(→)∆t$ ಎಂಬ ಅಭಿವ್ಯಕ್ತಿಯನ್ನು ಕರೆಯಲಾಗುತ್ತದೆ ದೇಹದ ಚಲನೆಯ ಸಮೀಕರಣ. ಅದೇ ಕ್ರಿಯೆಯನ್ನು - ಒಂದು ಬಿಂದುವಿನ ಆವೇಗದಲ್ಲಿನ ಬದಲಾವಣೆಯನ್ನು - ದೀರ್ಘಾವಧಿಯಲ್ಲಿ ಸಣ್ಣ ಬಲದಿಂದ ಮತ್ತು ಅಲ್ಪಾವಧಿಯಲ್ಲಿ ದೊಡ್ಡ ಬಲದಿಂದ ಸಾಧಿಸಬಹುದು ಎಂದು ಗಮನಿಸಬೇಕು.
ಸಿಸ್ಟಂನ ಪ್ರಚೋದನೆ ದೂರವಾಣಿ. ಮೊಮೆಂಟಮ್ ಬದಲಾವಣೆಯ ನಿಯಮ
ಯಾಂತ್ರಿಕ ವ್ಯವಸ್ಥೆಯ ಪ್ರಚೋದನೆ (ಚಲನೆಯ ಪ್ರಮಾಣ) ಈ ವ್ಯವಸ್ಥೆಯ ಎಲ್ಲಾ ವಸ್ತು ಬಿಂದುಗಳ ಪ್ರಚೋದನೆಗಳ ಮೊತ್ತಕ್ಕೆ ಸಮಾನವಾದ ವೆಕ್ಟರ್ ಆಗಿದೆ:
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
ಬದಲಾವಣೆ ಮತ್ತು ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮಗಳು ನ್ಯೂಟನ್ನ ಎರಡನೇ ಮತ್ತು ಮೂರನೇ ನಿಯಮಗಳ ಪರಿಣಾಮವಾಗಿದೆ.
ಎರಡು ದೇಹಗಳನ್ನು ಒಳಗೊಂಡಿರುವ ವ್ಯವಸ್ಥೆಯನ್ನು ನಾವು ಪರಿಗಣಿಸೋಣ. ವ್ಯವಸ್ಥೆಯ ದೇಹಗಳು ಪರಸ್ಪರ ಸಂವಹನ ನಡೆಸುವ ಚಿತ್ರದಲ್ಲಿನ ಶಕ್ತಿಗಳು ($F_(12)$ ಮತ್ತು $F_(21)$ ಅನ್ನು ಆಂತರಿಕ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ.
ಆಂತರಿಕ ಶಕ್ತಿಗಳ ಜೊತೆಗೆ, ಬಾಹ್ಯ ಶಕ್ತಿಗಳು $(F_1)↖(→)$ ಮತ್ತು $(F_2)↖(→)$ ಸಿಸ್ಟಂನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತವೆ. ಪ್ರತಿ ದೇಹಕ್ಕೆ ನಾವು $∆p↖(→)=F↖(→)∆t$ ಎಂಬ ಸಮೀಕರಣವನ್ನು ಬರೆಯಬಹುದು. ಈ ಸಮೀಕರಣಗಳ ಎಡ ಮತ್ತು ಬಲ ಬದಿಗಳನ್ನು ಸೇರಿಸಿದರೆ, ನಾವು ಪಡೆಯುತ್ತೇವೆ:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
ನ್ಯೂಟನ್ರ ಮೂರನೇ ನಿಯಮದ ಪ್ರಕಾರ, $(F_(12))↖(→)=-(F_(21))↖(→)$.
ಆದ್ದರಿಂದ,
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
ಎಡಭಾಗದಲ್ಲಿ ಸಿಸ್ಟಮ್ನ ಎಲ್ಲಾ ಕಾಯಗಳ ಪ್ರಚೋದನೆಗಳಲ್ಲಿನ ಬದಲಾವಣೆಗಳ ಜ್ಯಾಮಿತೀಯ ಮೊತ್ತವಿದೆ, ಇದು ವ್ಯವಸ್ಥೆಯ ಪ್ರಚೋದನೆಯ ಬದಲಾವಣೆಗೆ ಸಮನಾಗಿರುತ್ತದೆ - $(∆p_(syst))↖(→)$. ಇದನ್ನು ತೆಗೆದುಕೊಳ್ಳುವುದು ಖಾತೆ, ಸಮಾನತೆ $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ ಅನ್ನು ಬರೆಯಬಹುದು:
$(∆p_(syst))↖(→)=F↖(→)∆t$
ಇಲ್ಲಿ $F↖(→)$ ಎನ್ನುವುದು ದೇಹದ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಎಲ್ಲಾ ಬಾಹ್ಯ ಶಕ್ತಿಗಳ ಮೊತ್ತವಾಗಿದೆ. ಪಡೆದ ಫಲಿತಾಂಶವೆಂದರೆ ವ್ಯವಸ್ಥೆಯ ಆವೇಗವನ್ನು ಬಾಹ್ಯ ಶಕ್ತಿಗಳಿಂದ ಮಾತ್ರ ಬದಲಾಯಿಸಬಹುದು ಮತ್ತು ವ್ಯವಸ್ಥೆಯ ಆವೇಗದಲ್ಲಿನ ಬದಲಾವಣೆಯು ಒಟ್ಟು ಬಾಹ್ಯ ಶಕ್ತಿಯಂತೆಯೇ ನಿರ್ದೇಶಿಸಲ್ಪಡುತ್ತದೆ. ಇದು ಯಾಂತ್ರಿಕ ವ್ಯವಸ್ಥೆಯ ಆವೇಗದಲ್ಲಿನ ಬದಲಾವಣೆಯ ನಿಯಮದ ಸಾರವಾಗಿದೆ.
ಆಂತರಿಕ ಶಕ್ತಿಗಳು ವ್ಯವಸ್ಥೆಯ ಒಟ್ಟು ಆವೇಗವನ್ನು ಬದಲಾಯಿಸಲು ಸಾಧ್ಯವಿಲ್ಲ. ಅವರು ವ್ಯವಸ್ಥೆಯ ಪ್ರತ್ಯೇಕ ದೇಹಗಳ ಪ್ರಚೋದನೆಗಳನ್ನು ಮಾತ್ರ ಬದಲಾಯಿಸುತ್ತಾರೆ.
ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮ
ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವು $(∆p_(syst))↖(→)=F↖(→)∆t$ ಸಮೀಕರಣದಿಂದ ಅನುಸರಿಸುತ್ತದೆ. ವ್ಯವಸ್ಥೆಯ ಮೇಲೆ ಯಾವುದೇ ಬಾಹ್ಯ ಶಕ್ತಿಗಳು ಕಾರ್ಯನಿರ್ವಹಿಸದಿದ್ದರೆ, $(∆p_(syst))↖(→)=F↖(→)∆t$ ಸಮೀಕರಣದ ಬಲಭಾಗವು ಶೂನ್ಯವಾಗುತ್ತದೆ, ಅಂದರೆ ಸಿಸ್ಟಮ್ನ ಒಟ್ಟು ಆವೇಗವು ಬದಲಾಗದೆ ಉಳಿಯುತ್ತದೆ. :
$(∆p_(syst))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
ಯಾವುದೇ ಬಾಹ್ಯ ಶಕ್ತಿಗಳು ಕಾರ್ಯನಿರ್ವಹಿಸದ ಅಥವಾ ಬಾಹ್ಯ ಶಕ್ತಿಗಳ ಫಲಿತಾಂಶವು ಶೂನ್ಯವಾಗಿರುವ ವ್ಯವಸ್ಥೆಯನ್ನು ಕರೆಯಲಾಗುತ್ತದೆ ಮುಚ್ಚಲಾಗಿದೆ.
ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವು ಹೀಗೆ ಹೇಳುತ್ತದೆ:
ದೇಹಗಳ ಮುಚ್ಚಿದ ವ್ಯವಸ್ಥೆಯ ಒಟ್ಟು ಆವೇಗವು ಪರಸ್ಪರ ವ್ಯವಸ್ಥೆಯ ದೇಹಗಳ ಯಾವುದೇ ಪರಸ್ಪರ ಕ್ರಿಯೆಗೆ ಸ್ಥಿರವಾಗಿರುತ್ತದೆ.
ಪಡೆದ ಫಲಿತಾಂಶವು ಅನಿಯಂತ್ರಿತ ಸಂಖ್ಯೆಯ ದೇಹಗಳನ್ನು ಹೊಂದಿರುವ ವ್ಯವಸ್ಥೆಗೆ ಮಾನ್ಯವಾಗಿರುತ್ತದೆ. ಬಾಹ್ಯ ಶಕ್ತಿಗಳ ಮೊತ್ತವು ಶೂನ್ಯಕ್ಕೆ ಸಮನಾಗಿರುವುದಿಲ್ಲ, ಆದರೆ ಕೆಲವು ದಿಕ್ಕಿಗೆ ಅವುಗಳ ಪ್ರಕ್ಷೇಪಗಳ ಮೊತ್ತವು ಶೂನ್ಯಕ್ಕೆ ಸಮನಾಗಿದ್ದರೆ, ಈ ದಿಕ್ಕಿಗೆ ಸಿಸ್ಟಮ್ನ ಆವೇಗದ ಪ್ರಕ್ಷೇಪಣವು ಬದಲಾಗುವುದಿಲ್ಲ. ಆದ್ದರಿಂದ, ಉದಾಹರಣೆಗೆ, ಎಲ್ಲಾ ದೇಹಗಳ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಗುರುತ್ವಾಕರ್ಷಣೆಯ ಬಲದಿಂದಾಗಿ ಭೂಮಿಯ ಮೇಲ್ಮೈಯಲ್ಲಿರುವ ದೇಹಗಳ ವ್ಯವಸ್ಥೆಯನ್ನು ಮುಚ್ಚಲಾಗಿದೆ ಎಂದು ಪರಿಗಣಿಸಲಾಗುವುದಿಲ್ಲ, ಆದಾಗ್ಯೂ, ಸಮತಲ ದಿಕ್ಕಿನಲ್ಲಿರುವ ಪ್ರಚೋದನೆಗಳ ಮೊತ್ತವು ಬದಲಾಗದೆ ಉಳಿಯಬಹುದು (ಅನುಪಸ್ಥಿತಿಯಲ್ಲಿ ಘರ್ಷಣೆ), ಏಕೆಂದರೆ ಈ ದಿಕ್ಕಿನಲ್ಲಿ ಗುರುತ್ವಾಕರ್ಷಣೆಯ ಬಲವು ಕಾರ್ಯನಿರ್ವಹಿಸುವುದಿಲ್ಲ.
ಜೆಟ್ ಪ್ರೊಪಲ್ಷನ್
ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ಕಾನೂನಿನ ಸಿಂಧುತ್ವವನ್ನು ದೃಢೀಕರಿಸುವ ಉದಾಹರಣೆಗಳನ್ನು ನಾವು ಪರಿಗಣಿಸೋಣ.
ಮಕ್ಕಳ ರಬ್ಬರ್ ಚೆಂಡನ್ನು ತೆಗೆದುಕೊಂಡು ಅದನ್ನು ಗಾಳಿ ಮತ್ತು ಬಿಡುಗಡೆ ಮಾಡೋಣ. ಗಾಳಿಯು ಅದನ್ನು ಒಂದು ದಿಕ್ಕಿನಲ್ಲಿ ಬಿಡಲು ಪ್ರಾರಂಭಿಸಿದಾಗ, ಚೆಂಡು ಸ್ವತಃ ಇನ್ನೊಂದು ದಿಕ್ಕಿನಲ್ಲಿ ಹಾರುತ್ತದೆ ಎಂದು ನಾವು ನೋಡುತ್ತೇವೆ. ಚೆಂಡಿನ ಚಲನೆಯು ಜೆಟ್ ಚಲನೆಗೆ ಒಂದು ಉದಾಹರಣೆಯಾಗಿದೆ. ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮದಿಂದ ಇದನ್ನು ವಿವರಿಸಲಾಗಿದೆ: ಗಾಳಿಯು ಹರಿಯುವ ಮೊದಲು "ಬಾಲ್ ಪ್ಲಸ್ ಏರ್" ಸಿಸ್ಟಮ್ನ ಒಟ್ಟು ಆವೇಗವು ಶೂನ್ಯವಾಗಿರುತ್ತದೆ; ಚಲನೆಯ ಸಮಯದಲ್ಲಿ ಅದು ಶೂನ್ಯಕ್ಕೆ ಸಮನಾಗಿರಬೇಕು; ಆದ್ದರಿಂದ, ಚೆಂಡು ಜೆಟ್ನ ಹರಿವಿನ ದಿಕ್ಕಿನ ವಿರುದ್ಧ ದಿಕ್ಕಿನಲ್ಲಿ ಚಲಿಸುತ್ತದೆ ಮತ್ತು ಅದರ ಆವೇಗವು ಗಾಳಿಯ ಜೆಟ್ನ ಆವೇಗಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
ಜೆಟ್ ಚಲನೆದೇಹದ ಕೆಲವು ಭಾಗವು ಯಾವುದೇ ವೇಗದಲ್ಲಿ ಬೇರ್ಪಟ್ಟಾಗ ಸಂಭವಿಸುವ ಚಲನೆಯನ್ನು ಕರೆಯಿರಿ. ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮದಿಂದಾಗಿ, ದೇಹದ ಚಲನೆಯ ದಿಕ್ಕು ಪ್ರತ್ಯೇಕವಾದ ಭಾಗದ ಚಲನೆಯ ದಿಕ್ಕಿಗೆ ವಿರುದ್ಧವಾಗಿರುತ್ತದೆ.
ರಾಕೆಟ್ ಹಾರಾಟಗಳು ಜೆಟ್ ಪ್ರೊಪಲ್ಷನ್ ತತ್ವವನ್ನು ಆಧರಿಸಿವೆ. ಆಧುನಿಕ ಬಾಹ್ಯಾಕಾಶ ರಾಕೆಟ್ ಬಹಳ ಸಂಕೀರ್ಣವಾದ ವಿಮಾನವಾಗಿದೆ. ರಾಕೆಟ್ ದ್ರವ್ಯರಾಶಿಯು ಕಾರ್ಯನಿರ್ವಹಿಸುವ ದ್ರವದ ದ್ರವ್ಯರಾಶಿಯನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ (ಅಂದರೆ, ಇಂಧನ ದಹನದ ಪರಿಣಾಮವಾಗಿ ರೂಪುಗೊಂಡ ಬಿಸಿ ಅನಿಲಗಳು ಮತ್ತು ಜೆಟ್ ಸ್ಟ್ರೀಮ್ ರೂಪದಲ್ಲಿ ಹೊರಸೂಸುತ್ತವೆ) ಮತ್ತು ಅಂತಿಮ, ಅಥವಾ, ಅವರು ಹೇಳಿದಂತೆ, "ಶುಷ್ಕ" ದ್ರವ್ಯರಾಶಿ ಕೆಲಸ ಮಾಡುವ ದ್ರವವನ್ನು ರಾಕೆಟ್ನಿಂದ ಹೊರಹಾಕಿದ ನಂತರ ಉಳಿದಿರುವ ರಾಕೆಟ್.
ರಾಕೆಟ್ನಿಂದ ಹೆಚ್ಚಿನ ವೇಗದಲ್ಲಿ ಅನಿಲದ ಜೆಟ್ ಅನ್ನು ಹೊರಹಾಕಿದಾಗ, ರಾಕೆಟ್ ಸ್ವತಃ ವಿರುದ್ಧ ದಿಕ್ಕಿನಲ್ಲಿ ಧಾವಿಸುತ್ತದೆ. ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮದ ಪ್ರಕಾರ, ರಾಕೆಟ್ನಿಂದ ಸ್ವಾಧೀನಪಡಿಸಿಕೊಂಡಿರುವ ಆವೇಗವು $m_(p)υ_p$ ಹೊರಹಾಕಲ್ಪಟ್ಟ ಅನಿಲಗಳ ಆವೇಗ $m_(ಅನಿಲ)·υ_(ಗ್ಯಾಸ್)$ಗೆ ಸಮನಾಗಿರಬೇಕು:
$m_(p)υ_p=m_(ಗ್ಯಾಸ್)·υ_(ಗ್ಯಾಸ್)$
ಇದು ರಾಕೆಟ್ನ ವೇಗವನ್ನು ಅನುಸರಿಸುತ್ತದೆ
$υ_p=((m_(ಗ್ಯಾಸ್))/(m_p))·υ_(ಗ್ಯಾಸ್)$
ಈ ಸೂತ್ರದಿಂದ ರಾಕೆಟ್ನ ಹೆಚ್ಚಿನ ವೇಗ, ಹೊರಸೂಸುವ ಅನಿಲಗಳ ವೇಗ ಮತ್ತು ಕೆಲಸದ ದ್ರವದ ದ್ರವ್ಯರಾಶಿಯ (ಅಂದರೆ, ಇಂಧನದ ದ್ರವ್ಯರಾಶಿ) ಅಂತಿಮಕ್ಕೆ ("ಶುಷ್ಕ") ಅನುಪಾತವು ಸ್ಪಷ್ಟವಾಗುತ್ತದೆ. ರಾಕೆಟ್ ದ್ರವ್ಯರಾಶಿ.
ಸೂತ್ರವು $υ_p=((m_(ಗ್ಯಾಸ್))/(m_p))·υ_(ಗ್ಯಾಸ್)$ ಅಂದಾಜು ಆಗಿದೆ. ಇಂಧನವು ಸುಟ್ಟುಹೋದಂತೆ, ಹಾರುವ ರಾಕೆಟ್ನ ದ್ರವ್ಯರಾಶಿಯು ಕಡಿಮೆ ಮತ್ತು ಕಡಿಮೆ ಆಗುತ್ತದೆ ಎಂದು ಇದು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳುವುದಿಲ್ಲ. ರಾಕೆಟ್ ವೇಗದ ನಿಖರವಾದ ಸೂತ್ರವನ್ನು 1897 ರಲ್ಲಿ K. E. ಸಿಯೋಲ್ಕೊವ್ಸ್ಕಿ ಅವರು ಪಡೆದರು ಮತ್ತು ಅವರ ಹೆಸರನ್ನು ಹೊಂದಿದ್ದಾರೆ.
ಬಲದ ಕೆಲಸ
"ಕೆಲಸ" ಎಂಬ ಪದವನ್ನು 1826 ರಲ್ಲಿ ಫ್ರೆಂಚ್ ವಿಜ್ಞಾನಿ ಜೆ. ಪೊನ್ಸೆಲೆಟ್ ಅವರು ಭೌತಶಾಸ್ತ್ರಕ್ಕೆ ಪರಿಚಯಿಸಿದರು. ದೈನಂದಿನ ಜೀವನದಲ್ಲಿ ಮಾನವ ಶ್ರಮವನ್ನು ಮಾತ್ರ ಕೆಲಸ ಎಂದು ಕರೆಯುತ್ತಿದ್ದರೆ, ಭೌತಶಾಸ್ತ್ರದಲ್ಲಿ ಮತ್ತು ನಿರ್ದಿಷ್ಟವಾಗಿ ಯಂತ್ರಶಾಸ್ತ್ರದಲ್ಲಿ ಕೆಲಸವನ್ನು ಬಲದಿಂದ ನಿರ್ವಹಿಸಲಾಗುತ್ತದೆ ಎಂದು ಸಾಮಾನ್ಯವಾಗಿ ಒಪ್ಪಿಕೊಳ್ಳಲಾಗಿದೆ. ಕೆಲಸದ ಭೌತಿಕ ಪ್ರಮಾಣವನ್ನು ಸಾಮಾನ್ಯವಾಗಿ $A$ ಅಕ್ಷರದಿಂದ ಸೂಚಿಸಲಾಗುತ್ತದೆ.
ಬಲದ ಕೆಲಸಬಲದ ಕ್ರಿಯೆಯ ಅಳತೆಯಾಗಿದೆ, ಅದರ ಪ್ರಮಾಣ ಮತ್ತು ದಿಕ್ಕನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ, ಜೊತೆಗೆ ಬಲದ ಅನ್ವಯದ ಬಿಂದುವಿನ ಚಲನೆಯನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ. ಸ್ಥಿರ ಬಲ ಮತ್ತು ರೇಖೀಯ ಸ್ಥಳಾಂತರಕ್ಕಾಗಿ, ಕೆಲಸವನ್ನು ಸಮಾನತೆಯಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ:
$A=F|∆r↖(→)|cosα$
ಇಲ್ಲಿ $F$ ಎಂಬುದು ದೇಹದ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಶಕ್ತಿ, $∆r↖(→)$ ಎಂಬುದು ಸ್ಥಳಾಂತರ, $α$ ಎಂಬುದು ಬಲ ಮತ್ತು ಸ್ಥಳಾಂತರದ ನಡುವಿನ ಕೋನವಾಗಿದೆ.

ಬಲದ ಕೆಲಸವು ಬಲ ಮತ್ತು ಸ್ಥಳಾಂತರದ ಮಾಡ್ಯುಲಿಯ ಉತ್ಪನ್ನಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ ಮತ್ತು ಅವುಗಳ ನಡುವಿನ ಕೋನದ ಕೊಸೈನ್, ಅಂದರೆ, ವೆಕ್ಟರ್ಗಳ ಸ್ಕೇಲಾರ್ ಉತ್ಪನ್ನ $F↖(→)$ ಮತ್ತು $∆r↖(→)$.
ಕೆಲಸವು ಸ್ಕೇಲಾರ್ ಪ್ರಮಾಣವಾಗಿದೆ. $α 0$, ಮತ್ತು $90° ಆಗಿದ್ದರೆ
ದೇಹದ ಮೇಲೆ ಹಲವಾರು ಶಕ್ತಿಗಳು ಕಾರ್ಯನಿರ್ವಹಿಸಿದಾಗ, ಒಟ್ಟು ಕೆಲಸ (ಎಲ್ಲಾ ಶಕ್ತಿಗಳ ಕೆಲಸದ ಮೊತ್ತ) ಫಲಿತಾಂಶದ ಬಲದ ಕೆಲಸಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
SI ನಲ್ಲಿನ ಕೆಲಸದ ಘಟಕವಾಗಿದೆ ಜೌಲ್($1$ J). $1$ J ಎಂಬುದು ಈ ಬಲದ ಕ್ರಿಯೆಯ ದಿಕ್ಕಿನಲ್ಲಿ $1$ m ನ ಹಾದಿಯಲ್ಲಿ $1$ N ಬಲದಿಂದ ಮಾಡಿದ ಕೆಲಸವಾಗಿದೆ. ಈ ಘಟಕಕ್ಕೆ ಇಂಗ್ಲಿಷ್ ವಿಜ್ಞಾನಿ ಜೆ. ಜೌಲ್ (1818-1889) ಹೆಸರಿಡಲಾಗಿದೆ: $1$ J = $1$ N $·$ m. ಕಿಲೋಜೌಲ್ಗಳು ಮತ್ತು ಮಿಲಿಜೌಲ್ಗಳನ್ನು ಸಹ ಹೆಚ್ಚಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ: $1$ kJ $= 1,000$ J, $1$ mJ $ = $0.001 ಜೆ.
ಗುರುತ್ವಾಕರ್ಷಣೆಯ ಕೆಲಸ
ಇಳಿಜಾರಿನ ಕೋನ $α$ ಮತ್ತು ಎತ್ತರ $H$ನೊಂದಿಗೆ ಇಳಿಜಾರಾದ ಸಮತಲದ ಉದ್ದಕ್ಕೂ ಸ್ಲೈಡಿಂಗ್ ಮಾಡುವ ದೇಹವನ್ನು ನಾವು ಪರಿಗಣಿಸೋಣ.

ನಾವು $H$ ಮತ್ತು $α$ ಗೆ ಸಂಬಂಧಿಸಿದಂತೆ $∆x$ ಅನ್ನು ವ್ಯಕ್ತಪಡಿಸೋಣ:
$∆x=(H)/(sinα)$
ಗುರುತ್ವಾಕರ್ಷಣೆಯ ಬಲವು $F_т=mg$ $∆x=(H)/(sin)α$ ಸೂತ್ರವನ್ನು ಬಳಸಿಕೊಂಡು ಚಲನೆಯ ದಿಕ್ಕಿನೊಂದಿಗೆ ಕೋನವನ್ನು ($90° - α$) ಮಾಡುತ್ತದೆ ಎಂದು ಪರಿಗಣಿಸಿ, ನಾವು ಒಂದು ಅಭಿವ್ಯಕ್ತಿಯನ್ನು ಪಡೆಯುತ್ತೇವೆ ಗುರುತ್ವಾಕರ್ಷಣೆಯ ಕೆಲಸ $A_g$:
$A_g=mg cos(90°-α) (H)/(sinα)=mgH$
ಗುರುತ್ವಾಕರ್ಷಣೆಯಿಂದ ಮಾಡಿದ ಕೆಲಸವು ಎತ್ತರವನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ ಮತ್ತು ಸಮತಲದ ಇಳಿಜಾರಿನ ಕೋನವನ್ನು ಅವಲಂಬಿಸಿಲ್ಲ ಎಂಬುದು ಈ ಸೂತ್ರದಿಂದ ಸ್ಪಷ್ಟವಾಗುತ್ತದೆ.
ಅದು ಅನುಸರಿಸುತ್ತದೆ:
- ಗುರುತ್ವಾಕರ್ಷಣೆಯ ಕೆಲಸವು ದೇಹವು ಚಲಿಸುವ ಪಥದ ಆಕಾರವನ್ನು ಅವಲಂಬಿಸಿರುವುದಿಲ್ಲ, ಆದರೆ ದೇಹದ ಆರಂಭಿಕ ಮತ್ತು ಅಂತಿಮ ಸ್ಥಾನದ ಮೇಲೆ ಮಾತ್ರ;
- ದೇಹವು ಮುಚ್ಚಿದ ಪಥದಲ್ಲಿ ಚಲಿಸಿದಾಗ, ಗುರುತ್ವಾಕರ್ಷಣೆಯಿಂದ ಮಾಡಿದ ಕೆಲಸವು ಶೂನ್ಯವಾಗಿರುತ್ತದೆ, ಅಂದರೆ, ಗುರುತ್ವಾಕರ್ಷಣೆಯು ಸಂಪ್ರದಾಯವಾದಿ ಶಕ್ತಿಯಾಗಿದೆ (ಈ ಆಸ್ತಿಯನ್ನು ಹೊಂದಿರುವ ಶಕ್ತಿಗಳನ್ನು ಸಂಪ್ರದಾಯವಾದಿ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ).
ಪ್ರತಿಕ್ರಿಯೆ ಶಕ್ತಿಗಳ ಕೆಲಸ, ಇದು ಶೂನ್ಯಕ್ಕೆ ಸಮನಾಗಿರುತ್ತದೆ, ಏಕೆಂದರೆ ಪ್ರತಿಕ್ರಿಯಾ ಬಲವು ($N$) ಸ್ಥಳಾಂತರಕ್ಕೆ ಲಂಬವಾಗಿ ನಿರ್ದೇಶಿಸಲ್ಪಡುತ್ತದೆ $∆x$.
ಘರ್ಷಣೆ ಬಲದ ಕೆಲಸ
ಘರ್ಷಣೆ ಬಲವು ಸ್ಥಳಾಂತರಕ್ಕೆ ವಿರುದ್ಧವಾಗಿ ನಿರ್ದೇಶಿಸಲ್ಪಡುತ್ತದೆ $∆x$ ಮತ್ತು ಅದರೊಂದಿಗೆ $180°$ ಕೋನವನ್ನು ಮಾಡುತ್ತದೆ, ಆದ್ದರಿಂದ ಘರ್ಷಣೆ ಬಲದ ಕೆಲಸವು ಋಣಾತ್ಮಕವಾಗಿರುತ್ತದೆ:
$A_(tr)=F_(tr)∆x·cos180°=-F_(tr)·∆x$
$F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα), $ ನಂತರ
$A_(tr)=μmgHctgα$
ಸ್ಥಿತಿಸ್ಥಾಪಕ ಬಲದ ಕೆಲಸ
$l_0$ ಉದ್ದದ ವಿಸ್ತರಿಸದ ಸ್ಪ್ರಿಂಗ್ನಲ್ಲಿ $F↖(→)$ ಕಾರ್ಯನಿರ್ವಹಿಸಲು ಬಾಹ್ಯ ಬಲವನ್ನು ಅನುಮತಿಸಿ, ಅದನ್ನು $∆l_0=x_0$. ಸ್ಥಾನದಲ್ಲಿ $x=x_0F_(ನಿಯಂತ್ರಣ)=kx_0$. $F↖(→)$ ಬಲವು $x_0$ ನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವುದನ್ನು ನಿಲ್ಲಿಸಿದ ನಂತರ, $F_(ನಿಯಂತ್ರಣ)$ ಬಲದ ಕ್ರಿಯೆಯ ಅಡಿಯಲ್ಲಿ ವಸಂತವನ್ನು ಸಂಕುಚಿತಗೊಳಿಸಲಾಗುತ್ತದೆ.

ವಸಂತಕಾಲದ ಬಲ ತುದಿಯ ನಿರ್ದೇಶಾಂಕವು $x_0$ ನಿಂದ $x$ ಗೆ ಬದಲಾದಾಗ ಸ್ಥಿತಿಸ್ಥಾಪಕ ಬಲದ ಕೆಲಸವನ್ನು ನಾವು ನಿರ್ಧರಿಸೋಣ. ಈ ಪ್ರದೇಶದಲ್ಲಿ ಸ್ಥಿತಿಸ್ಥಾಪಕ ಬಲವು ರೇಖೀಯವಾಗಿ ಬದಲಾಗುವುದರಿಂದ, ಹುಕ್ನ ಕಾನೂನು ಈ ಪ್ರದೇಶದಲ್ಲಿ ಅದರ ಸರಾಸರಿ ಮೌಲ್ಯವನ್ನು ಬಳಸಬಹುದು:
$F_(ನಿಯಂತ್ರಣ av.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
ನಂತರ ಕೆಲಸ (ನಿರ್ದೇಶನಗಳು $(F_(ನಿಯಂತ್ರಣ av.))↖(→)$ ಮತ್ತು $(∆x)↖(→)$ ಸೇರಿಕೊಳ್ಳುತ್ತವೆ ಎಂಬ ಅಂಶವನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಂಡು:
$A_(ನಿಯಂತ್ರಣ)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
ಕೊನೆಯ ಸೂತ್ರದ ರೂಪವು $(F_(ನಿಯಂತ್ರಣ av.))↖(→)$ ಮತ್ತು $(∆x)↖(→)$ ನಡುವಿನ ಕೋನವನ್ನು ಅವಲಂಬಿಸಿಲ್ಲ ಎಂದು ತೋರಿಸಬಹುದು. ಸ್ಥಿತಿಸ್ಥಾಪಕ ಶಕ್ತಿಗಳ ಕೆಲಸವು ಆರಂಭಿಕ ಮತ್ತು ಅಂತಿಮ ರಾಜ್ಯಗಳಲ್ಲಿ ವಸಂತಕಾಲದ ವಿರೂಪಗಳ ಮೇಲೆ ಮಾತ್ರ ಅವಲಂಬಿತವಾಗಿರುತ್ತದೆ.
ಹೀಗಾಗಿ, ಗುರುತ್ವಾಕರ್ಷಣೆಯ ಬಲದಂತೆ ಸ್ಥಿತಿಸ್ಥಾಪಕ ಬಲವು ಸಂಪ್ರದಾಯವಾದಿ ಶಕ್ತಿಯಾಗಿದೆ.
ಶಕ್ತಿ ಶಕ್ತಿ
ಶಕ್ತಿಯು ಭೌತಿಕ ಪ್ರಮಾಣವಾಗಿದ್ದು, ಅದು ಉತ್ಪತ್ತಿಯಾಗುವ ಅವಧಿಗೆ ಕೆಲಸದ ಅನುಪಾತದಿಂದ ಅಳೆಯಲಾಗುತ್ತದೆ.
ಬೇರೆ ರೀತಿಯಲ್ಲಿ ಹೇಳುವುದಾದರೆ, ಒಂದು ಯುನಿಟ್ ಸಮಯದ ಪ್ರತಿ ಎಷ್ಟು ಕೆಲಸ ಮಾಡಲಾಗುತ್ತದೆ ಎಂಬುದನ್ನು ಪವರ್ ತೋರಿಸುತ್ತದೆ (SI ನಲ್ಲಿ - ಪ್ರತಿ $1$ s).
ಶಕ್ತಿಯನ್ನು ಸೂತ್ರದಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ:
ಇಲ್ಲಿ $N$ ಎಂದರೆ ಶಕ್ತಿ, $A$ ಎಂದರೆ $∆t$ ಸಮಯದಲ್ಲಿ ಮಾಡಿದ ಕೆಲಸ.
$A$ ಅದರ ಅಭಿವ್ಯಕ್ತಿ $A=F|(∆r)↖(→)|cosα$ ಗೆ ಬದಲಾಗಿ $N=(A)/(∆t)$ ಸೂತ್ರಕ್ಕೆ ಬದಲಿಯಾಗಿ, ನಾವು ಪಡೆಯುತ್ತೇವೆ:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
ಶಕ್ತಿಯು ಬಲ ಮತ್ತು ವೇಗ ವೆಕ್ಟರ್ಗಳ ಪ್ರಮಾಣಗಳ ಉತ್ಪನ್ನಕ್ಕೆ ಮತ್ತು ಈ ವಾಹಕಗಳ ನಡುವಿನ ಕೋನದ ಕೊಸೈನ್ಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
SI ವ್ಯವಸ್ಥೆಯಲ್ಲಿನ ಶಕ್ತಿಯನ್ನು ವ್ಯಾಟ್ಗಳಲ್ಲಿ (W) ಅಳೆಯಲಾಗುತ್ತದೆ. ಒಂದು ವ್ಯಾಟ್ ($1$ W) $1$ s ಗೆ $1$ J ಕೆಲಸವನ್ನು ಮಾಡುವ ಶಕ್ತಿಯಾಗಿದೆ: $1$ W $= 1$ J/s.
ಮೊದಲ ಸ್ಟೀಮ್ ಇಂಜಿನ್ ಅನ್ನು ನಿರ್ಮಿಸಿದ ಇಂಗ್ಲಿಷ್ ಸಂಶೋಧಕ ಜೆ. ವ್ಯಾಟ್ (ವ್ಯಾಟ್) ಅವರ ಹೆಸರನ್ನು ಈ ಘಟಕಕ್ಕೆ ಇಡಲಾಗಿದೆ. J. ವ್ಯಾಟ್ ಸ್ವತಃ (1736-1819) ಶಕ್ತಿಯ ಮತ್ತೊಂದು ಘಟಕವನ್ನು ಬಳಸಿದರು - ಅಶ್ವಶಕ್ತಿ (hp), ಅವರು ಉಗಿ ಎಂಜಿನ್ ಮತ್ತು ಕುದುರೆಯ ಕಾರ್ಯಕ್ಷಮತೆಯನ್ನು ಹೋಲಿಸಲು ಇದನ್ನು ಪರಿಚಯಿಸಿದರು: $1$ hp. $= 735.5$ W.
ತಂತ್ರಜ್ಞಾನದಲ್ಲಿ, ದೊಡ್ಡ ವಿದ್ಯುತ್ ಘಟಕಗಳನ್ನು ಹೆಚ್ಚಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ - ಕಿಲೋವ್ಯಾಟ್ ಮತ್ತು ಮೆಗಾವ್ಯಾಟ್: $1$ kW $= 1000$ W, $1$ MW $= 1000000$ W.
ಚಲನ ಶಕ್ತಿ. ಚಲನ ಶಕ್ತಿಯ ಬದಲಾವಣೆಯ ನಿಯಮ
ಒಂದು ದೇಹ ಅಥವಾ ಹಲವಾರು ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ದೇಹಗಳು (ದೇಹಗಳ ವ್ಯವಸ್ಥೆ) ಕೆಲಸ ಮಾಡಲು ಸಾಧ್ಯವಾದರೆ, ಅವು ಶಕ್ತಿಯನ್ನು ಹೊಂದಿವೆ ಎಂದು ಹೇಳಲಾಗುತ್ತದೆ.
"ಶಕ್ತಿ" ಎಂಬ ಪದವನ್ನು (ಗ್ರೀಕ್ ಎನರ್ಜಿಯಾದಿಂದ - ಕ್ರಿಯೆ, ಚಟುವಟಿಕೆ) ಸಾಮಾನ್ಯವಾಗಿ ದೈನಂದಿನ ಜೀವನದಲ್ಲಿ ಬಳಸಲಾಗುತ್ತದೆ. ಉದಾಹರಣೆಗೆ, ತ್ವರಿತವಾಗಿ ಕೆಲಸ ಮಾಡುವ ಜನರನ್ನು ಶಕ್ತಿಯುತ, ದೊಡ್ಡ ಶಕ್ತಿಯನ್ನು ಹೊಂದಿರುವವರು ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ.
ಚಲನೆಯ ಕಾರಣದಿಂದಾಗಿ ದೇಹವು ಹೊಂದಿರುವ ಶಕ್ತಿಯನ್ನು ಚಲನ ಶಕ್ತಿ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ.
ಸಾಮಾನ್ಯವಾಗಿ ಶಕ್ತಿಯ ವ್ಯಾಖ್ಯಾನದಂತೆ, ಚಲನ ಶಕ್ತಿಯ ಬಗ್ಗೆ ನಾವು ಹೇಳಬಹುದು ಚಲನ ಶಕ್ತಿಯು ಚಲಿಸುವ ದೇಹದ ಕೆಲಸ ಮಾಡುವ ಸಾಮರ್ಥ್ಯ.
$m$ ದ್ರವ್ಯರಾಶಿಯ ದೇಹದ ಚಲನ ಶಕ್ತಿಯು $υ$ ವೇಗದಲ್ಲಿ ಚಲಿಸುವುದನ್ನು ನಾವು ಕಂಡುಹಿಡಿಯೋಣ. ಚಲನ ಶಕ್ತಿಯು ಚಲನೆಯ ಕಾರಣದಿಂದಾಗಿ ಶಕ್ತಿಯಾಗಿರುವುದರಿಂದ, ಅದರ ಶೂನ್ಯ ಸ್ಥಿತಿಯು ದೇಹವು ವಿಶ್ರಾಂತಿಯಲ್ಲಿರುವ ಸ್ಥಿತಿಯಾಗಿದೆ. ದೇಹಕ್ಕೆ ನಿರ್ದಿಷ್ಟ ವೇಗವನ್ನು ನೀಡಲು ಅಗತ್ಯವಾದ ಕೆಲಸವನ್ನು ಕಂಡುಕೊಂಡ ನಂತರ, ನಾವು ಅದರ ಚಲನ ಶಕ್ತಿಯನ್ನು ಕಂಡುಕೊಳ್ಳುತ್ತೇವೆ.
ಇದನ್ನು ಮಾಡಲು, $∆r↖(→)$ ಬಲದ ವಾಹಕಗಳ ದಿಕ್ಕುಗಳು $F↖(→)$ ಮತ್ತು ಸ್ಥಳಾಂತರ $∆r↖(→)$ ಹೊಂದಿಕೆಯಾದಾಗ ಸ್ಥಳಾಂತರದ ಪ್ರದೇಶದಲ್ಲಿನ ಕೆಲಸವನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡೋಣ. ಈ ಸಂದರ್ಭದಲ್ಲಿ ಕೆಲಸ ಸಮಾನವಾಗಿರುತ್ತದೆ
ಅಲ್ಲಿ $∆x=∆r$

ವೇಗೋತ್ಕರ್ಷದ ಬಿಂದುವಿನ ಚಲನೆಗೆ $α=const$, ಸ್ಥಳಾಂತರದ ಅಭಿವ್ಯಕ್ತಿಯು ರೂಪವನ್ನು ಹೊಂದಿದೆ:
$∆x=υ_1t+(at^2)/(2),$
ಇಲ್ಲಿ $υ_1$ ಆರಂಭಿಕ ವೇಗವಾಗಿದೆ.
$∆x=υ_1t+(at^2)/(2)$ ನಿಂದ $∆x$ ಗಾಗಿನ ಅಭಿವ್ಯಕ್ತಿಯನ್ನು $A=F·∆x$ ಸಮೀಕರಣಕ್ಕೆ ಬದಲಿಸಿ ಮತ್ತು ನ್ಯೂಟನ್ನ ಎರಡನೇ ನಿಯಮವಾದ $F=ma$ ಬಳಸಿ, ನಾವು ಪಡೆಯುತ್ತೇವೆ:
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
ಆರಂಭಿಕ $υ_1$ ಮತ್ತು ಅಂತಿಮ $υ_2$ ವೇಗಗಳ ಮೂಲಕ ವೇಗವರ್ಧನೆಯನ್ನು ವ್ಯಕ್ತಪಡಿಸುವುದು $a=(υ_2-υ_1)/(t)$ ಮತ್ತು $A=ma(υ_1t+(at^2)/(2))=(mat) ನಲ್ಲಿ ಬದಲಿಯಾಗಿ )/ (2)(2υ_1+at)$ ನಾವು ಹೊಂದಿದ್ದೇವೆ:
$A=(m(υ_2-υ_1))/(2)·(2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
ಈಗ ಆರಂಭಿಕ ವೇಗವನ್ನು ಶೂನ್ಯಕ್ಕೆ ಸಮೀಕರಿಸಲಾಗುತ್ತಿದೆ: $υ_1=0$, ನಾವು ಒಂದು ಅಭಿವ್ಯಕ್ತಿಯನ್ನು ಪಡೆಯುತ್ತೇವೆ ಚಲನ ಶಕ್ತಿ:
$E_K=(mυ)/(2)=(p^2)/(2m)$
ಹೀಗಾಗಿ, ಚಲಿಸುವ ದೇಹವು ಚಲನ ಶಕ್ತಿಯನ್ನು ಹೊಂದಿರುತ್ತದೆ. ಈ ಶಕ್ತಿಯು ದೇಹದ ವೇಗವನ್ನು ಶೂನ್ಯದಿಂದ $υ$ ಮೌಲ್ಯಕ್ಕೆ ಹೆಚ್ಚಿಸಲು ಮಾಡಬೇಕಾದ ಕೆಲಸಕ್ಕೆ ಸಮನಾಗಿರುತ್ತದೆ.
$E_K=(mυ)/(2)=(p^2)/(2m)$ ನಿಂದ ದೇಹವನ್ನು ಒಂದು ಸ್ಥಾನದಿಂದ ಇನ್ನೊಂದು ಸ್ಥಾನಕ್ಕೆ ಚಲಿಸಲು ಶಕ್ತಿಯು ಮಾಡುವ ಕೆಲಸವು ಚಲನ ಶಕ್ತಿಯ ಬದಲಾವಣೆಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆ ಎಂದು ಅನುಸರಿಸುತ್ತದೆ:
$A=E_(K_2)-E_(K_1)=∆E_K$
ಸಮಾನತೆ $A=E_(K_2)-E_(K_1)=∆E_K$ ವ್ಯಕ್ತಪಡಿಸುತ್ತದೆ ಚಲನ ಶಕ್ತಿಯ ಬದಲಾವಣೆಯ ಪ್ರಮೇಯ.
ದೇಹದ ಚಲನ ಶಕ್ತಿಯಲ್ಲಿ ಬದಲಾವಣೆ(ಮೆಟೀರಿಯಲ್ ಪಾಯಿಂಟ್) ಒಂದು ನಿರ್ದಿಷ್ಟ ಅವಧಿಗೆ ದೇಹದ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಬಲದಿಂದ ಈ ಸಮಯದಲ್ಲಿ ಮಾಡಿದ ಕೆಲಸಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
ಸಂಭಾವ್ಯ ಶಕ್ತಿ
ಸಂಭಾವ್ಯ ಶಕ್ತಿಯು ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ದೇಹಗಳು ಅಥವಾ ಅದೇ ದೇಹದ ಭಾಗಗಳ ಸಂಬಂಧಿತ ಸ್ಥಾನದಿಂದ ನಿರ್ಧರಿಸಲ್ಪಟ್ಟ ಶಕ್ತಿಯಾಗಿದೆ.
ಶಕ್ತಿಯನ್ನು ಕೆಲಸ ಮಾಡುವ ದೇಹದ ಸಾಮರ್ಥ್ಯ ಎಂದು ವ್ಯಾಖ್ಯಾನಿಸಲಾಗಿರುವುದರಿಂದ, ಸಂಭಾವ್ಯ ಶಕ್ತಿಯನ್ನು ನೈಸರ್ಗಿಕವಾಗಿ ದೇಹಗಳ ಸಾಪೇಕ್ಷ ಸ್ಥಾನವನ್ನು ಅವಲಂಬಿಸಿ ಶಕ್ತಿಯಿಂದ ಮಾಡಿದ ಕೆಲಸ ಎಂದು ವ್ಯಾಖ್ಯಾನಿಸಲಾಗುತ್ತದೆ. ಇದು ಗುರುತ್ವಾಕರ್ಷಣೆಯ ಕೆಲಸವಾಗಿದೆ $A=mgh_1-mgh_2=mgH$ ಮತ್ತು ಸ್ಥಿತಿಸ್ಥಾಪಕತ್ವದ ಕೆಲಸ:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
ದೇಹದ ಸಂಭಾವ್ಯ ಶಕ್ತಿಭೂಮಿಯೊಂದಿಗೆ ಸಂವಹನ ನಡೆಸುವಾಗ, ಅವರು ಈ ದೇಹದ $m$ ದ್ರವ್ಯರಾಶಿಯ ಉತ್ಪನ್ನಕ್ಕೆ ಸಮಾನವಾದ ಪ್ರಮಾಣವನ್ನು ಕರೆಯುತ್ತಾರೆ, ಮುಕ್ತ ಪತನದ ವೇಗವರ್ಧನೆ $g$ ಮತ್ತು ಭೂಮಿಯ ಮೇಲ್ಮೈ ಮೇಲಿರುವ ದೇಹದ ಎತ್ತರ $h$:
ಸ್ಥಿತಿಸ್ಥಾಪಕವಾಗಿ ವಿರೂಪಗೊಂಡ ದೇಹದ ಸಂಭಾವ್ಯ ಶಕ್ತಿಯು ದೇಹದ ಸ್ಥಿತಿಸ್ಥಾಪಕತ್ವ (ಠೀವಿ) ಗುಣಾಂಕದ $k$ ಮತ್ತು ವರ್ಗದ ವಿರೂಪತೆಯ ಅರ್ಧದಷ್ಟು ಉತ್ಪನ್ನಕ್ಕೆ ಸಮಾನವಾದ ಮೌಲ್ಯವಾಗಿದೆ $∆l$:
$E_p=(1)/(2)k∆l^2$
$E_p=mgh$ ಮತ್ತು $E_p=(1)/(2)k∆l^2$ ಅನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಂಡು ಸಂಪ್ರದಾಯವಾದಿ ಶಕ್ತಿಗಳ (ಗುರುತ್ವಾಕರ್ಷಣೆ ಮತ್ತು ಸ್ಥಿತಿಸ್ಥಾಪಕತ್ವ) ಕೆಲಸವನ್ನು ಈ ಕೆಳಗಿನಂತೆ ವ್ಯಕ್ತಪಡಿಸಲಾಗುತ್ತದೆ:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
ಸಂಭಾವ್ಯ ಶಕ್ತಿಯ ಸಾಮಾನ್ಯ ವ್ಯಾಖ್ಯಾನವನ್ನು ನೀಡಲು ಈ ಸೂತ್ರವು ನಮಗೆ ಅನುಮತಿಸುತ್ತದೆ.
ವ್ಯವಸ್ಥೆಯ ಸಂಭಾವ್ಯ ಶಕ್ತಿಯು ದೇಹಗಳ ಸ್ಥಾನವನ್ನು ಅವಲಂಬಿಸಿರುವ ಪ್ರಮಾಣವಾಗಿದೆ, ವ್ಯವಸ್ಥೆಯ ಆರಂಭಿಕ ಸ್ಥಿತಿಯಿಂದ ಅಂತಿಮ ಸ್ಥಿತಿಗೆ ಪರಿವರ್ತನೆಯ ಸಮಯದಲ್ಲಿ ವ್ಯವಸ್ಥೆಯ ಆಂತರಿಕ ಸಂಪ್ರದಾಯವಾದಿ ಶಕ್ತಿಗಳ ಕೆಲಸಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ. ವಿರುದ್ಧ ಚಿಹ್ನೆಯೊಂದಿಗೆ ತೆಗೆದುಕೊಳ್ಳಲಾಗಿದೆ.
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ ಸಮೀಕರಣದ ಬಲಭಾಗದಲ್ಲಿರುವ ಮೈನಸ್ ಚಿಹ್ನೆ ಎಂದರೆ ಆಂತರಿಕ ಶಕ್ತಿಗಳಿಂದ ಕೆಲಸವನ್ನು ನಿರ್ವಹಿಸಿದಾಗ ( ಉದಾಹರಣೆಗೆ, "ರಾಕ್-ಅರ್ಥ್" ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಗುರುತ್ವಾಕರ್ಷಣೆಯ ಪ್ರಭಾವದ ಅಡಿಯಲ್ಲಿ ನೆಲದ ಮೇಲೆ ಬೀಳುವ ದೇಹಗಳು), ವ್ಯವಸ್ಥೆಯ ಶಕ್ತಿಯು ಕಡಿಮೆಯಾಗುತ್ತದೆ. ವ್ಯವಸ್ಥೆಯಲ್ಲಿನ ಸಂಭಾವ್ಯ ಶಕ್ತಿಯ ಕೆಲಸ ಮತ್ತು ಬದಲಾವಣೆಗಳು ಯಾವಾಗಲೂ ವಿರುದ್ಧ ಚಿಹ್ನೆಗಳನ್ನು ಹೊಂದಿರುತ್ತವೆ.
ಕೆಲಸವು ಸಂಭಾವ್ಯ ಶಕ್ತಿಯ ಬದಲಾವಣೆಯನ್ನು ಮಾತ್ರ ನಿರ್ಧರಿಸುವುದರಿಂದ, ಶಕ್ತಿಯ ಬದಲಾವಣೆಯು ಯಂತ್ರಶಾಸ್ತ್ರದಲ್ಲಿ ಭೌತಿಕ ಅರ್ಥವನ್ನು ಹೊಂದಿರುತ್ತದೆ. ಆದ್ದರಿಂದ, ಶೂನ್ಯ ಶಕ್ತಿಯ ಮಟ್ಟದ ಆಯ್ಕೆಯು ಅನಿಯಂತ್ರಿತವಾಗಿದೆ ಮತ್ತು ಅನುಕೂಲತೆಯ ಪರಿಗಣನೆಯಿಂದ ಮಾತ್ರ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ, ಉದಾಹರಣೆಗೆ, ಅನುಗುಣವಾದ ಸಮೀಕರಣಗಳನ್ನು ಬರೆಯುವ ಸುಲಭ.
ಯಾಂತ್ರಿಕ ಶಕ್ತಿಯ ಬದಲಾವಣೆ ಮತ್ತು ಸಂರಕ್ಷಣೆಯ ಕಾನೂನು
ವ್ಯವಸ್ಥೆಯ ಒಟ್ಟು ಯಾಂತ್ರಿಕ ಶಕ್ತಿಅದರ ಚಲನ ಮತ್ತು ಸಂಭಾವ್ಯ ಶಕ್ತಿಗಳ ಮೊತ್ತವನ್ನು ಕರೆಯಲಾಗುತ್ತದೆ:
ಇದನ್ನು ದೇಹಗಳ ಸ್ಥಾನ (ಸಂಭಾವ್ಯ ಶಕ್ತಿ) ಮತ್ತು ಅವುಗಳ ವೇಗ (ಚಲನ ಶಕ್ತಿ) ನಿರ್ಧರಿಸುತ್ತದೆ.
ಚಲನ ಶಕ್ತಿ ಪ್ರಮೇಯದ ಪ್ರಕಾರ,
$E_k-E_(k_1)=A_p+A_(pr),$
ಇಲ್ಲಿ $A_p$ ಎಂಬುದು ಸಂಭಾವ್ಯ ಶಕ್ತಿಗಳ ಕೆಲಸ, $A_(pr)$ ಎಂಬುದು ಸಂಭಾವ್ಯವಲ್ಲದ ಶಕ್ತಿಗಳ ಕೆಲಸ.
ಪ್ರತಿಯಾಗಿ, ಸಂಭಾವ್ಯ ಶಕ್ತಿಗಳ ಕೆಲಸವು ಆರಂಭಿಕ $E_(p_1)$ ಮತ್ತು ಅಂತಿಮ $E_p$ ಸ್ಥಿತಿಗಳಲ್ಲಿ ದೇಹದ ಸಂಭಾವ್ಯ ಶಕ್ತಿಯ ವ್ಯತ್ಯಾಸಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ. ಇದನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಂಡು, ನಾವು ಒಂದು ಅಭಿವ್ಯಕ್ತಿಯನ್ನು ಪಡೆಯುತ್ತೇವೆ ಯಾಂತ್ರಿಕ ಶಕ್ತಿಯ ಬದಲಾವಣೆಯ ನಿಯಮ:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
ಅಲ್ಲಿ ಸಮಾನತೆಯ ಎಡಭಾಗವು ಒಟ್ಟು ಯಾಂತ್ರಿಕ ಶಕ್ತಿಯ ಬದಲಾವಣೆಯಾಗಿದೆ, ಮತ್ತು ಬಲಭಾಗವು ಸಂಭಾವ್ಯವಲ್ಲದ ಶಕ್ತಿಗಳ ಕೆಲಸವಾಗಿದೆ.
ಆದ್ದರಿಂದ, ಯಾಂತ್ರಿಕ ಶಕ್ತಿಯ ಬದಲಾವಣೆಯ ನಿಯಮಓದುತ್ತದೆ:
ವ್ಯವಸ್ಥೆಯ ಯಾಂತ್ರಿಕ ಶಕ್ತಿಯ ಬದಲಾವಣೆಯು ಎಲ್ಲಾ ಸಂಭಾವ್ಯವಲ್ಲದ ಶಕ್ತಿಗಳ ಕೆಲಸಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
ಸಂಭಾವ್ಯ ಶಕ್ತಿಗಳು ಮಾತ್ರ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಯಾಂತ್ರಿಕ ವ್ಯವಸ್ಥೆಯನ್ನು ಸಂಪ್ರದಾಯವಾದಿ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ.
ಸಂಪ್ರದಾಯವಾದಿ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ $A_(pr) = 0$. ಇದು ಸೂಚಿಸುತ್ತದೆ ಯಾಂತ್ರಿಕ ಶಕ್ತಿಯ ಸಂರಕ್ಷಣೆಯ ನಿಯಮ:
ಮುಚ್ಚಿದ ಸಂಪ್ರದಾಯವಾದಿ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ, ಒಟ್ಟು ಯಾಂತ್ರಿಕ ಶಕ್ತಿಯನ್ನು ಸಂರಕ್ಷಿಸಲಾಗಿದೆ (ಸಮಯದೊಂದಿಗೆ ಬದಲಾಗುವುದಿಲ್ಲ):
$E_k+E_p=E_(k_1)+E_(p_1)$
ಯಾಂತ್ರಿಕ ಶಕ್ತಿಯ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವು ನ್ಯೂಟನ್ರ ಯಂತ್ರಶಾಸ್ತ್ರದ ನಿಯಮಗಳಿಂದ ಹುಟ್ಟಿಕೊಂಡಿದೆ, ಇದು ವಸ್ತು ಬಿಂದುಗಳ (ಅಥವಾ ಮ್ಯಾಕ್ರೋಪಾರ್ಟಿಕಲ್ಸ್) ವ್ಯವಸ್ಥೆಗೆ ಅನ್ವಯಿಸುತ್ತದೆ.
ಆದಾಗ್ಯೂ, ಯಾಂತ್ರಿಕ ಶಕ್ತಿಯ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವು ಮೈಕ್ರೋಪಾರ್ಟಿಕಲ್ಗಳ ವ್ಯವಸ್ಥೆಗೆ ಸಹ ಮಾನ್ಯವಾಗಿದೆ, ಅಲ್ಲಿ ನ್ಯೂಟನ್ನ ಕಾನೂನುಗಳು ಇನ್ನು ಮುಂದೆ ಅನ್ವಯಿಸುವುದಿಲ್ಲ.
ಯಾಂತ್ರಿಕ ಶಕ್ತಿಯ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವು ಸಮಯದ ಏಕರೂಪತೆಯ ಪರಿಣಾಮವಾಗಿದೆ.
ಸಮಯದ ಏಕರೂಪತೆಅದೇ ಆರಂಭಿಕ ಪರಿಸ್ಥಿತಿಗಳಲ್ಲಿ, ಭೌತಿಕ ಪ್ರಕ್ರಿಯೆಗಳ ಸಂಭವವು ಈ ಪರಿಸ್ಥಿತಿಗಳನ್ನು ಯಾವ ಸಮಯದಲ್ಲಿ ರಚಿಸಲಾಗಿದೆ ಎಂಬುದರ ಮೇಲೆ ಅವಲಂಬಿತವಾಗಿರುವುದಿಲ್ಲ.
ಒಟ್ಟು ಯಾಂತ್ರಿಕ ಶಕ್ತಿಯ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವೆಂದರೆ ಸಂಪ್ರದಾಯವಾದಿ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಚಲನ ಶಕ್ತಿಯು ಬದಲಾದಾಗ, ಅದರ ಸಂಭಾವ್ಯ ಶಕ್ತಿಯು ಸಹ ಬದಲಾಗಬೇಕು, ಆದ್ದರಿಂದ ಅವುಗಳ ಮೊತ್ತವು ಸ್ಥಿರವಾಗಿರುತ್ತದೆ. ಇದರರ್ಥ ಒಂದು ರೀತಿಯ ಶಕ್ತಿಯನ್ನು ಇನ್ನೊಂದಕ್ಕೆ ಪರಿವರ್ತಿಸುವ ಸಾಧ್ಯತೆ.
ವಸ್ತುವಿನ ಚಲನೆಯ ವಿವಿಧ ರೂಪಗಳಿಗೆ ಅನುಗುಣವಾಗಿ, ವಿವಿಧ ರೀತಿಯ ಶಕ್ತಿಯನ್ನು ಪರಿಗಣಿಸಲಾಗುತ್ತದೆ: ಯಾಂತ್ರಿಕ, ಆಂತರಿಕ (ದೇಹದ ದ್ರವ್ಯರಾಶಿಯ ಕೇಂದ್ರಕ್ಕೆ ಮತ್ತು ಸಂಭಾವ್ಯ ಶಕ್ತಿಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ಅಣುಗಳ ಅಸ್ತವ್ಯಸ್ತವಾಗಿರುವ ಚಲನೆಯ ಚಲನ ಶಕ್ತಿಯ ಮೊತ್ತಕ್ಕೆ ಸಮನಾಗಿರುತ್ತದೆ. ಪರಸ್ಪರ ಅಣುಗಳ ಪರಸ್ಪರ ಕ್ರಿಯೆ), ವಿದ್ಯುತ್ಕಾಂತೀಯ, ರಾಸಾಯನಿಕ (ಇದು ಎಲೆಕ್ಟ್ರಾನ್ಗಳ ಚಲನೆಯ ಚಲನ ಶಕ್ತಿಯನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ ಮತ್ತು ವಿದ್ಯುತ್ ಪರಸ್ಪರ ಮತ್ತು ಪರಮಾಣು ನ್ಯೂಕ್ಲಿಯಸ್ಗಳೊಂದಿಗಿನ ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಶಕ್ತಿಯನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ), ಪರಮಾಣು, ಇತ್ಯಾದಿ. ಮೇಲಿನಿಂದ ಅದು ಸ್ಪಷ್ಟವಾಗಿದೆ ವಿವಿಧ ರೀತಿಯ ಶಕ್ತಿಯ ವಿಭಜನೆಯು ಸಾಕಷ್ಟು ಅನಿಯಂತ್ರಿತವಾಗಿದೆ.
ನೈಸರ್ಗಿಕ ವಿದ್ಯಮಾನಗಳು ಸಾಮಾನ್ಯವಾಗಿ ಒಂದು ರೀತಿಯ ಶಕ್ತಿಯನ್ನು ಇನ್ನೊಂದಕ್ಕೆ ಪರಿವರ್ತಿಸುವುದರೊಂದಿಗೆ ಇರುತ್ತದೆ. ಉದಾಹರಣೆಗೆ, ವಿವಿಧ ಕಾರ್ಯವಿಧಾನಗಳ ಭಾಗಗಳ ಘರ್ಷಣೆಯು ಯಾಂತ್ರಿಕ ಶಕ್ತಿಯನ್ನು ಶಾಖವಾಗಿ ಪರಿವರ್ತಿಸಲು ಕಾರಣವಾಗುತ್ತದೆ, ಅಂದರೆ. ಆಂತರಿಕ ಶಕ್ತಿ.ಶಾಖ ಎಂಜಿನ್ಗಳಲ್ಲಿ, ಇದಕ್ಕೆ ವಿರುದ್ಧವಾಗಿ, ಆಂತರಿಕ ಶಕ್ತಿಯನ್ನು ಯಾಂತ್ರಿಕ ಶಕ್ತಿಯಾಗಿ ಪರಿವರ್ತಿಸಲಾಗುತ್ತದೆ; ಗಾಲ್ವನಿಕ್ ಕೋಶಗಳಲ್ಲಿ, ರಾಸಾಯನಿಕ ಶಕ್ತಿಯನ್ನು ವಿದ್ಯುತ್ ಶಕ್ತಿಯಾಗಿ ಪರಿವರ್ತಿಸಲಾಗುತ್ತದೆ, ಇತ್ಯಾದಿ.
ಪ್ರಸ್ತುತ, ಶಕ್ತಿಯ ಪರಿಕಲ್ಪನೆಯು ಭೌತಶಾಸ್ತ್ರದ ಮೂಲಭೂತ ಪರಿಕಲ್ಪನೆಗಳಲ್ಲಿ ಒಂದಾಗಿದೆ. ಈ ಪರಿಕಲ್ಪನೆಯು ಒಂದು ರೀತಿಯ ಚಲನೆಯನ್ನು ಇನ್ನೊಂದಕ್ಕೆ ಪರಿವರ್ತಿಸುವ ಕಲ್ಪನೆಯೊಂದಿಗೆ ಬೇರ್ಪಡಿಸಲಾಗದಂತೆ ಸಂಬಂಧ ಹೊಂದಿದೆ.
ಆಧುನಿಕ ಭೌತಶಾಸ್ತ್ರದಲ್ಲಿ ಶಕ್ತಿಯ ಪರಿಕಲ್ಪನೆಯನ್ನು ಈ ರೀತಿ ರೂಪಿಸಲಾಗಿದೆ:
ಶಕ್ತಿಯು ಎಲ್ಲಾ ರೀತಿಯ ವಸ್ತುಗಳ ಚಲನೆ ಮತ್ತು ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಸಾಮಾನ್ಯ ಪರಿಮಾಣಾತ್ಮಕ ಅಳತೆಯಾಗಿದೆ. ಶಕ್ತಿಯು ಯಾವುದರಿಂದಲೂ ಗೋಚರಿಸುವುದಿಲ್ಲ ಮತ್ತು ಕಣ್ಮರೆಯಾಗುವುದಿಲ್ಲ, ಅದು ಒಂದು ರೂಪದಿಂದ ಇನ್ನೊಂದಕ್ಕೆ ಮಾತ್ರ ಚಲಿಸಬಹುದು. ಶಕ್ತಿಯ ಪರಿಕಲ್ಪನೆಯು ಎಲ್ಲಾ ನೈಸರ್ಗಿಕ ವಿದ್ಯಮಾನಗಳನ್ನು ಒಟ್ಟಿಗೆ ಜೋಡಿಸುತ್ತದೆ.
ಸರಳ ಕಾರ್ಯವಿಧಾನಗಳು. ಯಾಂತ್ರಿಕ ದಕ್ಷತೆ
ಸರಳ ಕಾರ್ಯವಿಧಾನಗಳು ದೇಹಕ್ಕೆ ಅನ್ವಯಿಸಲಾದ ಬಲಗಳ ಪ್ರಮಾಣ ಅಥವಾ ದಿಕ್ಕನ್ನು ಬದಲಾಯಿಸುವ ಸಾಧನಗಳಾಗಿವೆ.
ಕಡಿಮೆ ಪ್ರಯತ್ನದಿಂದ ದೊಡ್ಡ ಹೊರೆಗಳನ್ನು ಸರಿಸಲು ಅಥವಾ ಎತ್ತುವಂತೆ ಅವುಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ. ಇವುಗಳಲ್ಲಿ ಲಿವರ್ ಮತ್ತು ಅದರ ಪ್ರಭೇದಗಳು ಸೇರಿವೆ - ಬ್ಲಾಕ್ಗಳು (ಚಲಿಸುವ ಮತ್ತು ಸ್ಥಿರ), ಗೇಟ್ಗಳು, ಇಳಿಜಾರಾದ ಪ್ಲೇನ್ ಮತ್ತು ಅದರ ಪ್ರಭೇದಗಳು - ಬೆಣೆ, ತಿರುಪು, ಇತ್ಯಾದಿ.
ಲಿವರ್ ತೋಳು. ಹತೋಟಿ ನಿಯಮ
ಲಿವರ್ ಎನ್ನುವುದು ಸ್ಥಿರವಾದ ಬೆಂಬಲದ ಸುತ್ತಲೂ ತಿರುಗುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಹೊಂದಿರುವ ಕಟ್ಟುನಿಟ್ಟಾದ ದೇಹವಾಗಿದೆ.

ಹತೋಟಿಯ ನಿಯಮವು ಹೇಳುತ್ತದೆ:
ಲಿವರ್ಗೆ ಅನ್ವಯಿಸಲಾದ ಬಲಗಳು ತಮ್ಮ ತೋಳುಗಳಿಗೆ ವಿಲೋಮ ಅನುಪಾತದಲ್ಲಿದ್ದರೆ ಅದು ಸಮತೋಲನದಲ್ಲಿರುತ್ತದೆ:
$(F_2)/(F_1)=(l_1)/(l_2)$
ಸೂತ್ರದಿಂದ $(F_2)/(F_1)=(l_1)/(l_2)$, ಅದಕ್ಕೆ ಅನುಪಾತದ ಆಸ್ತಿಯನ್ನು ಅನ್ವಯಿಸುವುದು (ಅನುಪಾತದ ತೀವ್ರ ಪದಗಳ ಉತ್ಪನ್ನವು ಅದರ ಮಧ್ಯಮ ಪದಗಳ ಉತ್ಪನ್ನಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ), ನಾವು ಕೆಳಗಿನ ಸೂತ್ರವನ್ನು ಪಡೆಯಬಹುದು:
ಆದರೆ $F_1l_1=M_1$ ಲಿವರ್ ಅನ್ನು ಪ್ರದಕ್ಷಿಣಾಕಾರವಾಗಿ ತಿರುಗಿಸುವ ಬಲದ ಕ್ಷಣವಾಗಿದೆ, ಮತ್ತು $F_2l_2=M_2$ ಲಿವರ್ ಅನ್ನು ಅಪ್ರದಕ್ಷಿಣಾಕಾರವಾಗಿ ತಿರುಗಿಸಲು ಪ್ರಯತ್ನಿಸುವ ಬಲದ ಕ್ಷಣವಾಗಿದೆ. ಹೀಗಾಗಿ, $M_1=M_2$, ಇದು ಸಾಬೀತುಪಡಿಸಬೇಕಾದದ್ದು.
ಲಿವರ್ ಅನ್ನು ಪ್ರಾಚೀನ ಕಾಲದಲ್ಲಿ ಜನರು ಬಳಸಲಾರಂಭಿಸಿದರು. ಅದರ ಸಹಾಯದಿಂದ, ಪ್ರಾಚೀನ ಈಜಿಪ್ಟ್ನಲ್ಲಿ ಪಿರಮಿಡ್ಗಳ ನಿರ್ಮಾಣದ ಸಮಯದಲ್ಲಿ ಭಾರವಾದ ಕಲ್ಲಿನ ಚಪ್ಪಡಿಗಳನ್ನು ಎತ್ತುವುದು ಸಾಧ್ಯವಾಯಿತು. ಹತೋಟಿ ಇಲ್ಲದೆ ಇದು ಸಾಧ್ಯವಿಲ್ಲ. ಎಲ್ಲಾ ನಂತರ, ಉದಾಹರಣೆಗೆ, $ 147 $ ಮೀ ಎತ್ತರವನ್ನು ಹೊಂದಿರುವ ಚಿಯೋಪ್ಸ್ ಪಿರಮಿಡ್ ನಿರ್ಮಾಣಕ್ಕಾಗಿ, ಎರಡು ದಶಲಕ್ಷಕ್ಕೂ ಹೆಚ್ಚು ಕಲ್ಲಿನ ಬ್ಲಾಕ್ಗಳನ್ನು ಬಳಸಲಾಯಿತು, ಅದರಲ್ಲಿ ಚಿಕ್ಕದಾದ $ 2.5 $ ಟನ್ ತೂಕವಿತ್ತು!
ಇತ್ತೀಚಿನ ದಿನಗಳಲ್ಲಿ, ಸನ್ನೆಕೋಲಿನ ಉತ್ಪಾದನೆಯಲ್ಲಿ (ಉದಾಹರಣೆಗೆ, ಕ್ರೇನ್ಗಳು) ಮತ್ತು ದೈನಂದಿನ ಜೀವನದಲ್ಲಿ (ಕತ್ತರಿಗಳು, ತಂತಿ ಕಟ್ಟರ್ಗಳು, ಮಾಪಕಗಳು) ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ.
ಸ್ಥಿರ ಬ್ಲಾಕ್
ಸ್ಥಿರ ಬ್ಲಾಕ್ನ ಕ್ರಿಯೆಯು ಸಮಾನ ತೋಳುಗಳನ್ನು ಹೊಂದಿರುವ ಲಿವರ್ನ ಕ್ರಿಯೆಯನ್ನು ಹೋಲುತ್ತದೆ: $l_1=l_2=r$. ಅನ್ವಯಿಕ ಶಕ್ತಿ $F_1$ ಲೋಡ್ $F_2$ ಗೆ ಸಮನಾಗಿರುತ್ತದೆ ಮತ್ತು ಸಮತೋಲನ ಸ್ಥಿತಿಯು:
ಸ್ಥಿರ ಬ್ಲಾಕ್ನೀವು ಬಲದ ದಿಕ್ಕನ್ನು ಅದರ ಪ್ರಮಾಣವನ್ನು ಬದಲಾಯಿಸದೆ ಬದಲಾಯಿಸಬೇಕಾದಾಗ ಬಳಸಲಾಗುತ್ತದೆ.
ಚಲಿಸಬಲ್ಲ ಬ್ಲಾಕ್
ಚಲಿಸುವ ಬ್ಲಾಕ್ ಲಿವರ್ನಂತೆಯೇ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ, ಅದರ ತೋಳುಗಳು: $l_2=(l_1)/(2)=r$. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಸಮತೋಲನ ಸ್ಥಿತಿಯು ರೂಪವನ್ನು ಹೊಂದಿದೆ:
ಇಲ್ಲಿ $F_1$ ಅನ್ವಯಿಕ ಬಲವಾಗಿದೆ, $F_2$ ಲೋಡ್ ಆಗಿದೆ. ಚಲಿಸುವ ಬ್ಲಾಕ್ನ ಬಳಕೆಯು ಶಕ್ತಿಯಲ್ಲಿ ದ್ವಿಗುಣ ಲಾಭವನ್ನು ನೀಡುತ್ತದೆ.
ಪುಲ್ಲಿ ಹೋಸ್ಟ್ (ಬ್ಲಾಕ್ ಸಿಸ್ಟಮ್)
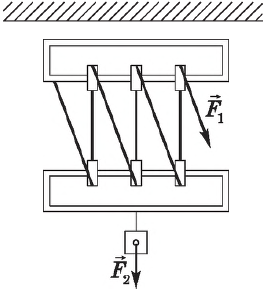
ಒಂದು ಸಾಂಪ್ರದಾಯಿಕ ಚೈನ್ ಹೋಸ್ಟ್ $n$ ಚಲಿಸುವ ಮತ್ತು $n$ ಸ್ಥಿರ ಬ್ಲಾಕ್ಗಳನ್ನು ಒಳಗೊಂಡಿದೆ. ಇದನ್ನು ಬಳಸುವುದರಿಂದ $2n$ ಪಟ್ಟು ಬಲವನ್ನು ಪಡೆಯುತ್ತದೆ:
$F_1=(F_2)/(2n)$
ಪವರ್ ಚೈನ್ ಹೋಸ್ಟ್ n ಚಲಿಸಬಲ್ಲ ಮತ್ತು ಒಂದು ಸ್ಥಿರ ಬ್ಲಾಕ್ ಅನ್ನು ಒಳಗೊಂಡಿದೆ. ಪವರ್ ಪುಲ್ಲಿಯ ಬಳಕೆಯು ಶಕ್ತಿಯಲ್ಲಿ $2^n$ ಬಾರಿ ಲಾಭವನ್ನು ನೀಡುತ್ತದೆ:
$F_1=(F_2)/(2^n)$

ತಿರುಪು
ಸ್ಕ್ರೂ ಎಂಬುದು ಅಕ್ಷದ ಸುತ್ತ ಸುತ್ತುವ ಇಳಿಜಾರಾದ ಸಮತಲವಾಗಿದೆ.
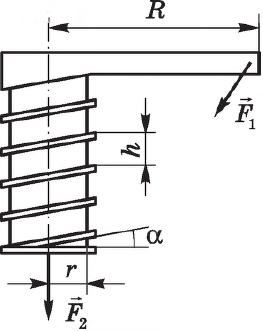
ಪ್ರೊಪೆಲ್ಲರ್ನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಶಕ್ತಿಗಳ ಸಮತೋಲನ ಸ್ಥಿತಿಯು ರೂಪವನ್ನು ಹೊಂದಿದೆ:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

ಇಲ್ಲಿ $F_1$ ಎಂಬುದು ಪ್ರೊಪೆಲ್ಲರ್ಗೆ ಅನ್ವಯಿಸಲಾದ ಬಾಹ್ಯ ಬಲವಾಗಿದೆ ಮತ್ತು ಅದರ ಅಕ್ಷದಿಂದ $R$ ದೂರದಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ; $F_2$ ಎಂಬುದು ಪ್ರೊಪೆಲ್ಲರ್ ಅಕ್ಷದ ದಿಕ್ಕಿನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಬಲವಾಗಿದೆ; $h $ - ಪ್ರೊಪೆಲ್ಲರ್ ಪಿಚ್; $r$ ಸರಾಸರಿ ಥ್ರೆಡ್ ತ್ರಿಜ್ಯವಾಗಿದೆ; $α$ ಎಂಬುದು ದಾರದ ಇಳಿಜಾರಿನ ಕೋನವಾಗಿದೆ. $R$ ಎಂಬುದು $F_1$ ಬಲದೊಂದಿಗೆ ಸ್ಕ್ರೂ ಅನ್ನು ತಿರುಗಿಸುವ ಲಿವರ್ (ವ್ರೆಂಚ್) ನ ಉದ್ದವಾಗಿದೆ.
ದಕ್ಷತೆ
ದಕ್ಷತೆಯ ಗುಣಾಂಕ (ದಕ್ಷತೆ) ಎನ್ನುವುದು ಖರ್ಚು ಮಾಡಿದ ಎಲ್ಲಾ ಕೆಲಸಗಳಿಗೆ ಉಪಯುಕ್ತ ಕೆಲಸದ ಅನುಪಾತವಾಗಿದೆ.
ದಕ್ಷತೆಯನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಶೇಕಡಾವಾರು ಪ್ರಮಾಣದಲ್ಲಿ ವ್ಯಕ್ತಪಡಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಗ್ರೀಕ್ ಅಕ್ಷರದ $η$ ("ಇದು") ನಿಂದ ಸೂಚಿಸಲಾಗುತ್ತದೆ:
$η=(A_p)/(A_3)·100%$
ಇಲ್ಲಿ $A_n$ ಉಪಯುಕ್ತ ಕೆಲಸವಾಗಿದೆ, $A_3$ ಎಲ್ಲಾ ಖರ್ಚು ಮಾಡಿದ ಕೆಲಸವಾಗಿದೆ.
ಉಪಯುಕ್ತ ಕೆಲಸವು ಯಾವಾಗಲೂ ಒಂದು ಅಥವಾ ಇನ್ನೊಂದು ಕಾರ್ಯವಿಧಾನವನ್ನು ಬಳಸಿಕೊಂಡು ವ್ಯಕ್ತಿಯು ಖರ್ಚು ಮಾಡುವ ಒಟ್ಟು ಕೆಲಸದ ಒಂದು ಭಾಗವನ್ನು ಮಾತ್ರ ಒಳಗೊಂಡಿರುತ್ತದೆ.
ಮಾಡಿದ ಕೆಲಸದ ಭಾಗವನ್ನು ಘರ್ಷಣೆಯ ಶಕ್ತಿಗಳನ್ನು ಮೀರಿಸಲು ಖರ್ಚು ಮಾಡಲಾಗುತ್ತದೆ. $A_3 > A_n$ ರಿಂದ, ದಕ್ಷತೆಯು ಯಾವಾಗಲೂ $1$ ಗಿಂತ ಕಡಿಮೆಯಿರುತ್ತದೆ (ಅಥವಾ $< 100%$).
ಈ ಸಮಾನತೆಯಲ್ಲಿನ ಪ್ರತಿಯೊಂದು ಕೃತಿಯನ್ನು ಅನುಗುಣವಾದ ಬಲ ಮತ್ತು ಪ್ರಯಾಣದ ದೂರದ ಉತ್ಪನ್ನವಾಗಿ ವ್ಯಕ್ತಪಡಿಸಬಹುದಾದ್ದರಿಂದ, ಅದನ್ನು ಈ ಕೆಳಗಿನಂತೆ ಪುನಃ ಬರೆಯಬಹುದು: $F_1s_1≈F_2s_2$.
ಅದು ಅನುಸರಿಸುತ್ತದೆ, ಜಾರಿಯಲ್ಲಿರುವ ಯಾಂತ್ರಿಕತೆಯ ಸಹಾಯದಿಂದ ನಾವು ಗೆಲ್ಲುತ್ತೇವೆ, ದಾರಿಯುದ್ದಕ್ಕೂ ನಾವು ಅದೇ ಸಂಖ್ಯೆಯ ಬಾರಿ ಕಳೆದುಕೊಳ್ಳುತ್ತೇವೆ ಮತ್ತು ಪ್ರತಿಯಾಗಿ. ಈ ಕಾನೂನನ್ನು ಯಂತ್ರಶಾಸ್ತ್ರದ ಸುವರ್ಣ ನಿಯಮ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ.
ಯಂತ್ರಶಾಸ್ತ್ರದ ಸುವರ್ಣ ನಿಯಮವು ಅಂದಾಜು ನಿಯಮವಾಗಿದೆ, ಏಕೆಂದರೆ ಇದು ಬಳಸಿದ ಸಾಧನಗಳ ಭಾಗಗಳ ಘರ್ಷಣೆ ಮತ್ತು ಗುರುತ್ವಾಕರ್ಷಣೆಯನ್ನು ನಿವಾರಿಸುವ ಕೆಲಸವನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳುವುದಿಲ್ಲ. ಅದೇನೇ ಇದ್ದರೂ, ಯಾವುದೇ ಸರಳ ಕಾರ್ಯವಿಧಾನದ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ವಿಶ್ಲೇಷಿಸಲು ಇದು ತುಂಬಾ ಉಪಯುಕ್ತವಾಗಿದೆ.

ಆದ್ದರಿಂದ, ಉದಾಹರಣೆಗೆ, ಈ ನಿಯಮಕ್ಕೆ ಧನ್ಯವಾದಗಳು, ಚಿತ್ರದಲ್ಲಿ ತೋರಿಸಿರುವ ಕೆಲಸಗಾರನು ಲೋಡ್ ಅನ್ನು $ 10 $ ಸೆಂ.ಮೀ ವರೆಗೆ ಎತ್ತುವ ಶಕ್ತಿಯಲ್ಲಿ ಡಬಲ್ ಲಾಭದೊಂದಿಗೆ, ಲಿವರ್ನ ವಿರುದ್ಧ ತುದಿಯನ್ನು $ 20 ರಷ್ಟು ಕಡಿಮೆ ಮಾಡಬೇಕಾಗುತ್ತದೆ ಎಂದು ನಾವು ತಕ್ಷಣ ಹೇಳಬಹುದು. $ ಸೆಂ.
ದೇಹಗಳ ಘರ್ಷಣೆ. ಸ್ಥಿತಿಸ್ಥಾಪಕ ಮತ್ತು ಸ್ಥಿತಿಸ್ಥಾಪಕ ಪರಿಣಾಮಗಳು
ಘರ್ಷಣೆಯ ನಂತರ ದೇಹಗಳ ಚಲನೆಯ ಸಮಸ್ಯೆಯನ್ನು ಪರಿಹರಿಸಲು ಆವೇಗ ಮತ್ತು ಯಾಂತ್ರಿಕ ಶಕ್ತಿಯ ಸಂರಕ್ಷಣೆಯ ನಿಯಮಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ: ಘರ್ಷಣೆಯ ಮೊದಲು ತಿಳಿದಿರುವ ಪ್ರಚೋದನೆಗಳು ಮತ್ತು ಶಕ್ತಿಗಳಿಂದ, ಘರ್ಷಣೆಯ ನಂತರ ಈ ಪ್ರಮಾಣಗಳ ಮೌಲ್ಯಗಳನ್ನು ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ. ಸ್ಥಿತಿಸ್ಥಾಪಕ ಮತ್ತು ಸ್ಥಿತಿಸ್ಥಾಪಕ ಪರಿಣಾಮಗಳ ಪ್ರಕರಣಗಳನ್ನು ನಾವು ಪರಿಗಣಿಸೋಣ.
ಪ್ರಭಾವವನ್ನು ಸಂಪೂರ್ಣವಾಗಿ ಅಸ್ಥಿರತೆ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ, ಅದರ ನಂತರ ದೇಹಗಳು ಒಂದು ನಿರ್ದಿಷ್ಟ ವೇಗದಲ್ಲಿ ಚಲಿಸುವ ಒಂದೇ ದೇಹವನ್ನು ರೂಪಿಸುತ್ತವೆ. ನಂತರದ ವೇಗದ ಸಮಸ್ಯೆಯನ್ನು ಪ್ರಭಾವದ ಮೊದಲು ಮತ್ತು ನಂತರ $m_1$ ಮತ್ತು $m_2$ (ನಾವು ಎರಡು ದೇಹಗಳ ಬಗ್ಗೆ ಮಾತನಾಡುತ್ತಿದ್ದರೆ) ದ್ರವ್ಯರಾಶಿಗಳೊಂದಿಗೆ ಕಾಯಗಳ ವ್ಯವಸ್ಥೆಯ ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವನ್ನು ಬಳಸಿಕೊಂಡು ಪರಿಹರಿಸಲಾಗುತ್ತದೆ:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
ಅಸ್ಥಿರ ಪ್ರಭಾವದ ಸಮಯದಲ್ಲಿ ದೇಹಗಳ ಚಲನ ಶಕ್ತಿಯು ಸಂರಕ್ಷಿಸಲ್ಪಡುವುದಿಲ್ಲ ಎಂಬುದು ಸ್ಪಷ್ಟವಾಗಿದೆ (ಉದಾಹರಣೆಗೆ, $(υ_1)↖(→)=-(υ_2)↖(→)$ ಮತ್ತು $m_1=m_2$ ಇದು ಶೂನ್ಯಕ್ಕೆ ಸಮನಾಗಿರುತ್ತದೆ ಪ್ರಭಾವದ ನಂತರ).
ಪ್ರಚೋದನೆಗಳ ಮೊತ್ತವನ್ನು ಮಾತ್ರ ಸಂರಕ್ಷಿಸಲಾಗುವುದಿಲ್ಲ, ಆದರೆ ಪರಿಣಾಮ ಬೀರುವ ದೇಹಗಳ ಚಲನ ಶಕ್ತಿಗಳ ಮೊತ್ತವನ್ನು ಸಂಪೂರ್ಣವಾಗಿ ಸ್ಥಿತಿಸ್ಥಾಪಕ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ.
ಸಂಪೂರ್ಣ ಸ್ಥಿತಿಸ್ಥಾಪಕ ಪರಿಣಾಮಕ್ಕಾಗಿ, ಈ ಕೆಳಗಿನ ಸಮೀಕರಣಗಳು ಮಾನ್ಯವಾಗಿರುತ್ತವೆ:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2) )^2)/(2)$
ಇಲ್ಲಿ $m_1, m_2$ ಎಂಬುದು ಚೆಂಡುಗಳ ದ್ರವ್ಯರಾಶಿಗಳು, $υ_1, υ_2$ ಎಂಬುದು ಪ್ರಭಾವದ ಮೊದಲು ಚೆಂಡುಗಳ ವೇಗ, $υ"_1, υ"_2$ ಪ್ರಭಾವದ ನಂತರದ ಚೆಂಡುಗಳ ವೇಗ.
ವಿವರಗಳು ವರ್ಗ: ಮೆಕ್ಯಾನಿಕ್ಸ್ ಪ್ರಕಟಿತ 04/21/2014 14:29 ವೀಕ್ಷಣೆಗಳು: 53533ಶಾಸ್ತ್ರೀಯ ಯಂತ್ರಶಾಸ್ತ್ರದಲ್ಲಿ, ಎರಡು ಸಂರಕ್ಷಣಾ ನಿಯಮಗಳಿವೆ: ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮ ಮತ್ತು ಶಕ್ತಿಯ ಸಂರಕ್ಷಣೆಯ ನಿಯಮ.
ದೇಹದ ಪ್ರಚೋದನೆ

ಆವೇಗದ ಪರಿಕಲ್ಪನೆಯನ್ನು ಮೊದಲು ಫ್ರೆಂಚ್ ಗಣಿತಜ್ಞ, ಭೌತಶಾಸ್ತ್ರಜ್ಞ ಮತ್ತು ಮೆಕ್ಯಾನಿಕ್ ಪರಿಚಯಿಸಿದರು. ಮತ್ತು ಪ್ರಚೋದನೆ ಎಂದು ಕರೆಯಲ್ಪಡುವ ತತ್ವಜ್ಞಾನಿ ಡೆಸ್ಕಾರ್ಟೆಸ್ ಚಲನೆಯ ಪ್ರಮಾಣ .
ಲ್ಯಾಟಿನ್ ಭಾಷೆಯಿಂದ, "ಪ್ರಚೋದನೆ" ಅನ್ನು "ತಳ್ಳುವುದು, ಚಲಿಸು" ಎಂದು ಅನುವಾದಿಸಲಾಗುತ್ತದೆ.
ಚಲಿಸುವ ಯಾವುದೇ ದೇಹವು ಆವೇಗವನ್ನು ಹೊಂದಿರುತ್ತದೆ.
ಒಂದು ಬಂಡಿ ಸ್ಥಿರವಾಗಿ ನಿಂತಿದೆ ಎಂದು ಊಹಿಸೋಣ. ಇದರ ಆವೇಗ ಶೂನ್ಯ. ಆದರೆ ಗಾಡಿ ಚಲಿಸಲು ಪ್ರಾರಂಭಿಸಿದ ತಕ್ಷಣ, ಅದರ ಆವೇಗವು ಇನ್ನು ಮುಂದೆ ಶೂನ್ಯವಾಗಿರುತ್ತದೆ. ವೇಗ ಬದಲಾದಂತೆ ಅದು ಬದಲಾಗಲು ಪ್ರಾರಂಭವಾಗುತ್ತದೆ.
ವಸ್ತು ಬಿಂದುವಿನ ಆವೇಗ, ಅಥವಾ ಚಲನೆಯ ಪ್ರಮಾಣ - ಒಂದು ಬಿಂದುವಿನ ದ್ರವ್ಯರಾಶಿ ಮತ್ತು ಅದರ ವೇಗದ ಉತ್ಪನ್ನಕ್ಕೆ ಸಮಾನವಾದ ವೆಕ್ಟರ್ ಪ್ರಮಾಣ. ಬಿಂದುವಿನ ಆವೇಗ ವೆಕ್ಟರ್ನ ದಿಕ್ಕು ವೇಗ ವೆಕ್ಟರ್ನ ದಿಕ್ಕಿನೊಂದಿಗೆ ಹೊಂದಿಕೆಯಾಗುತ್ತದೆ.
ನಾವು ಘನ ಭೌತಿಕ ದೇಹದ ಬಗ್ಗೆ ಮಾತನಾಡುತ್ತಿದ್ದರೆ, ಅಂತಹ ದೇಹದ ಆವೇಗವನ್ನು ಈ ದೇಹದ ದ್ರವ್ಯರಾಶಿಯ ಉತ್ಪನ್ನ ಮತ್ತು ದ್ರವ್ಯರಾಶಿಯ ಕೇಂದ್ರದ ವೇಗ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ.
ದೇಹದ ಆವೇಗವನ್ನು ಹೇಗೆ ಲೆಕ್ಕ ಹಾಕುವುದು? ದೇಹವು ಅನೇಕ ವಸ್ತು ಬಿಂದುಗಳನ್ನು ಅಥವಾ ವಸ್ತು ಬಿಂದುಗಳ ವ್ಯವಸ್ಥೆಯನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ ಎಂದು ಒಬ್ಬರು ಊಹಿಸಬಹುದು.
ಒಂದು ವೇಳೆ - ಒಂದು ವಸ್ತು ಬಿಂದುವಿನ ಪ್ರಚೋದನೆ, ನಂತರ ವಸ್ತು ಬಿಂದುಗಳ ವ್ಯವಸ್ಥೆಯ ಪ್ರಚೋದನೆ
![]()
ಅದು, ವಸ್ತು ಬಿಂದುಗಳ ವ್ಯವಸ್ಥೆಯ ಆವೇಗ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಸೇರಿಸಲಾದ ಎಲ್ಲಾ ವಸ್ತು ಬಿಂದುಗಳ ಮೊಮೆಟಾದ ವೆಕ್ಟರ್ ಮೊತ್ತವಾಗಿದೆ. ಇದು ಈ ಬಿಂದುಗಳ ದ್ರವ್ಯರಾಶಿಗಳ ಉತ್ಪನ್ನ ಮತ್ತು ಅವುಗಳ ವೇಗಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
ಇಂಟರ್ನ್ಯಾಷನಲ್ ಸಿಸ್ಟಮ್ ಆಫ್ ಯೂನಿಟ್ಸ್ (SI) ನಲ್ಲಿನ ಪ್ರಚೋದನೆಯ ಘಟಕವು ಸೆಕೆಂಡಿಗೆ ಕಿಲೋಗ್ರಾಂ-ಮೀಟರ್ ಆಗಿದೆ (ಕೆಜಿ ಮೀ/ಸೆಕೆಂಡ್).
ಉದ್ವೇಗ ಶಕ್ತಿ

ಯಂತ್ರಶಾಸ್ತ್ರದಲ್ಲಿ, ದೇಹದ ಆವೇಗ ಮತ್ತು ಬಲದ ನಡುವೆ ನಿಕಟ ಸಂಪರ್ಕವಿದೆ. ಈ ಎರಡು ಪ್ರಮಾಣಗಳನ್ನು ಎಂಬ ಪ್ರಮಾಣದಿಂದ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ ಬಲದ ಪ್ರಚೋದನೆ .
ದೇಹದ ಮೇಲೆ ನಿರಂತರ ಶಕ್ತಿ ಕಾರ್ಯನಿರ್ವಹಿಸಿದರೆಎಫ್ ಕಾಲಾಂತರದಲ್ಲಿ ಟಿ , ನಂತರ ನ್ಯೂಟನ್ರ ಎರಡನೇ ನಿಯಮದ ಪ್ರಕಾರ
![]()
![]()
ಈ ಸೂತ್ರವು ದೇಹದ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಶಕ್ತಿ, ಈ ಶಕ್ತಿಯ ಕ್ರಿಯೆಯ ಸಮಯ ಮತ್ತು ದೇಹದ ವೇಗದಲ್ಲಿನ ಬದಲಾವಣೆಯ ನಡುವಿನ ಸಂಬಂಧವನ್ನು ತೋರಿಸುತ್ತದೆ.
ದೇಹದ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಬಲದ ಉತ್ಪನ್ನಕ್ಕೆ ಸಮಾನವಾದ ಪ್ರಮಾಣ ಮತ್ತು ಅದು ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಸಮಯವನ್ನು ಕರೆಯಲಾಗುತ್ತದೆ ಬಲದ ಪ್ರಚೋದನೆ .
ನಾವು ಸಮೀಕರಣದಿಂದ ನೋಡುವಂತೆ, ಬಲದ ಪ್ರಚೋದನೆಯು ಸಮಯದ ಆರಂಭಿಕ ಮತ್ತು ಅಂತಿಮ ಕ್ಷಣಗಳಲ್ಲಿ ದೇಹದ ಪ್ರಚೋದನೆಗಳಲ್ಲಿನ ವ್ಯತ್ಯಾಸಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ ಅಥವಾ ಸ್ವಲ್ಪ ಸಮಯದವರೆಗೆ ಪ್ರಚೋದನೆಯ ಬದಲಾವಣೆಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
ಆವೇಗದ ರೂಪದಲ್ಲಿ ನ್ಯೂಟನ್ನ ಎರಡನೇ ನಿಯಮವನ್ನು ಈ ಕೆಳಗಿನಂತೆ ರೂಪಿಸಲಾಗಿದೆ: ದೇಹದ ಆವೇಗದಲ್ಲಿನ ಬದಲಾವಣೆಯು ಅದರ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಬಲದ ಆವೇಗಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ. ನ್ಯೂಟನ್ ಸ್ವತಃ ಮೂಲತಃ ತನ್ನ ಕಾನೂನನ್ನು ನಿಖರವಾಗಿ ಈ ರೀತಿಯಲ್ಲಿ ರೂಪಿಸಿದ್ದಾನೆ ಎಂದು ಹೇಳಬೇಕು.
ಫೋರ್ಸ್ ಇಂಪಲ್ಸ್ ಸಹ ವೆಕ್ಟರ್ ಪ್ರಮಾಣವಾಗಿದೆ.

ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವು ನ್ಯೂಟನ್ನ ಮೂರನೇ ನಿಯಮದಿಂದ ಅನುಸರಿಸುತ್ತದೆ.
ಈ ಕಾನೂನು ಮುಚ್ಚಿದ ಅಥವಾ ಪ್ರತ್ಯೇಕವಾದ ಭೌತಿಕ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಮಾತ್ರ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ ಎಂಬುದನ್ನು ನೆನಪಿನಲ್ಲಿಡಬೇಕು. ಮುಚ್ಚಿದ ವ್ಯವಸ್ಥೆಯು ದೇಹಗಳು ಪರಸ್ಪರ ಮಾತ್ರ ಸಂವಹನ ನಡೆಸುವ ವ್ಯವಸ್ಥೆಯಾಗಿದೆ ಮತ್ತು ಬಾಹ್ಯ ದೇಹಗಳೊಂದಿಗೆ ಸಂವಹನ ನಡೆಸುವುದಿಲ್ಲ.
ಎರಡು ಭೌತಿಕ ದೇಹಗಳ ಮುಚ್ಚಿದ ವ್ಯವಸ್ಥೆಯನ್ನು ನಾವು ಊಹಿಸೋಣ. ಪರಸ್ಪರ ದೇಹಗಳ ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಶಕ್ತಿಗಳನ್ನು ಆಂತರಿಕ ಶಕ್ತಿಗಳು ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ.
ಮೊದಲ ದೇಹಕ್ಕೆ ಶಕ್ತಿಯ ಪ್ರಚೋದನೆಯು ಸಮಾನವಾಗಿರುತ್ತದೆ
ನ್ಯೂಟನ್ರ ಮೂರನೇ ನಿಯಮದ ಪ್ರಕಾರ, ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಸಮಯದಲ್ಲಿ ದೇಹಗಳ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಶಕ್ತಿಗಳು ಪ್ರಮಾಣದಲ್ಲಿ ಸಮಾನವಾಗಿರುತ್ತದೆ ಮತ್ತು ದಿಕ್ಕಿನಲ್ಲಿ ವಿರುದ್ಧವಾಗಿರುತ್ತದೆ.
ಆದ್ದರಿಂದ, ಎರಡನೇ ದೇಹಕ್ಕೆ ಬಲದ ಆವೇಗವು ಸಮಾನವಾಗಿರುತ್ತದೆ
ಸರಳ ಲೆಕ್ಕಾಚಾರಗಳ ಮೂಲಕ ನಾವು ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮಕ್ಕೆ ಗಣಿತದ ಅಭಿವ್ಯಕ್ತಿಯನ್ನು ಪಡೆಯುತ್ತೇವೆ:
ಎಲ್ಲಿ ಮೀ 1 ಮತ್ತು ಮೀ 2 - ದೇಹದ ದ್ರವ್ಯರಾಶಿ,
v 1 ಮತ್ತು v 2 - ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಮೊದಲು ಮೊದಲ ಮತ್ತು ಎರಡನೆಯ ಕಾಯಗಳ ವೇಗ,
v 1" ಮತ್ತು v 2" – ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ನಂತರ ಮೊದಲ ಮತ್ತು ಎರಡನೆಯ ಕಾಯಗಳ ವೇಗ .
ಪ 1 = ಮೀ 1 · v 1 - ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಮೊದಲು ಮೊದಲ ದೇಹದ ಆವೇಗ;
p 2 = m 2 · v 2 - ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಮೊದಲು ಎರಡನೇ ದೇಹದ ಆವೇಗ;
ಪು 1 "= ಮೀ 1 · v 1" - ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ನಂತರ ಮೊದಲ ದೇಹದ ಆವೇಗ;
ಪು 2 "= ಮೀ 2 · v 2" - ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ನಂತರ ಎರಡನೇ ದೇಹದ ಆವೇಗ;
ಅದು
ಪ 1 + ಪ 2 = ಪು 1" + ಪು 2"
ಮುಚ್ಚಿದ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ, ದೇಹಗಳು ಪ್ರಚೋದನೆಗಳನ್ನು ಮಾತ್ರ ವಿನಿಮಯ ಮಾಡಿಕೊಳ್ಳುತ್ತವೆ. ಮತ್ತು ಅವುಗಳ ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಮೊದಲು ಈ ಕಾಯಗಳ ಮೊಮೆಟಾದ ವೆಕ್ಟರ್ ಮೊತ್ತವು ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ನಂತರ ಅವುಗಳ ಮೊಮೆಟಾದ ವೆಕ್ಟರ್ ಮೊತ್ತಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
ಆದ್ದರಿಂದ, ಬಂದೂಕಿನಿಂದ ಗುಂಡು ಹಾರಿಸಿದ ಪರಿಣಾಮವಾಗಿ, ಬಂದೂಕಿನ ಆವೇಗ ಮತ್ತು ಬುಲೆಟ್ನ ಆವೇಗವು ಬದಲಾಗುತ್ತದೆ. ಆದರೆ ಹೊಡೆತದ ಮೊದಲು ಬಂದೂಕು ಮತ್ತು ಅದರಲ್ಲಿರುವ ಬುಲೆಟ್ನ ಪ್ರಚೋದನೆಗಳ ಮೊತ್ತವು ಹೊಡೆತದ ನಂತರ ಬಂದೂಕಿನ ಮತ್ತು ಹಾರುವ ಬುಲೆಟ್ನ ಪ್ರಚೋದನೆಗಳ ಮೊತ್ತಕ್ಕೆ ಸಮನಾಗಿ ಉಳಿಯುತ್ತದೆ.
ಫಿರಂಗಿಯನ್ನು ಹಾರಿಸುವಾಗ, ಹಿಮ್ಮೆಟ್ಟುವಿಕೆ ಇರುತ್ತದೆ. ಉತ್ಕ್ಷೇಪಕವು ಮುಂದಕ್ಕೆ ಹಾರುತ್ತದೆ, ಮತ್ತು ಗನ್ ಸ್ವತಃ ಹಿಂದಕ್ಕೆ ಉರುಳುತ್ತದೆ. ಉತ್ಕ್ಷೇಪಕ ಮತ್ತು ಗನ್ ಮುಚ್ಚಿದ ವ್ಯವಸ್ಥೆಯಾಗಿದ್ದು, ಇದರಲ್ಲಿ ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವು ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ.
ಪ್ರತಿ ದೇಹದ ಆವೇಗ ಮುಚ್ಚಿದ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಪರಸ್ಪರ ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಪರಿಣಾಮವಾಗಿ ಬದಲಾಗಬಹುದು. ಆದರೆ ಮುಚ್ಚಿದ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಸೇರಿಸಲಾದ ಕಾಯಗಳ ಪ್ರಚೋದನೆಗಳ ವೆಕ್ಟರ್ ಮೊತ್ತವು ಈ ದೇಹಗಳು ಕಾಲಾನಂತರದಲ್ಲಿ ಸಂವಹನ ನಡೆಸಿದಾಗ ಬದಲಾಗುವುದಿಲ್ಲ, ಅಂದರೆ ಅದು ಸ್ಥಿರವಾಗಿರುತ್ತದೆ. ಅದು ಏನು ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮ.
ಹೆಚ್ಚು ನಿಖರವಾಗಿ, ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವನ್ನು ಈ ಕೆಳಗಿನಂತೆ ರೂಪಿಸಲಾಗಿದೆ: ಮುಚ್ಚಿದ ವ್ಯವಸ್ಥೆಯ ಎಲ್ಲಾ ಕಾಯಗಳ ಪ್ರಚೋದನೆಗಳ ವೆಕ್ಟರ್ ಮೊತ್ತವು ಅದರ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಯಾವುದೇ ಬಾಹ್ಯ ಶಕ್ತಿಗಳಿಲ್ಲದಿದ್ದರೆ ಅಥವಾ ಅವುಗಳ ವೆಕ್ಟರ್ ಮೊತ್ತವು ಶೂನ್ಯಕ್ಕೆ ಸಮಾನವಾಗಿದ್ದರೆ ಸ್ಥಿರ ಮೌಲ್ಯವಾಗಿರುತ್ತದೆ.
ವ್ಯವಸ್ಥೆಯ ಮೇಲಿನ ಬಾಹ್ಯ ಶಕ್ತಿಗಳ ಕ್ರಿಯೆಯ ಪರಿಣಾಮವಾಗಿ ದೇಹಗಳ ವ್ಯವಸ್ಥೆಯ ಆವೇಗವು ಬದಲಾಗಬಹುದು. ತದನಂತರ ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ಕಾನೂನು ಅನ್ವಯಿಸುವುದಿಲ್ಲ.
ಮುಚ್ಚಿದ ವ್ಯವಸ್ಥೆಗಳು ಪ್ರಕೃತಿಯಲ್ಲಿ ಅಸ್ತಿತ್ವದಲ್ಲಿಲ್ಲ ಎಂದು ಹೇಳಬೇಕು. ಆದರೆ, ಬಾಹ್ಯ ಶಕ್ತಿಗಳ ಕ್ರಿಯೆಯ ಸಮಯವು ತುಂಬಾ ಚಿಕ್ಕದಾಗಿದ್ದರೆ, ಉದಾಹರಣೆಗೆ, ಸ್ಫೋಟ, ಶಾಟ್, ಇತ್ಯಾದಿಗಳ ಸಮಯದಲ್ಲಿ, ಈ ಸಂದರ್ಭದಲ್ಲಿ ವ್ಯವಸ್ಥೆಯ ಮೇಲೆ ಬಾಹ್ಯ ಶಕ್ತಿಗಳ ಪ್ರಭಾವವನ್ನು ನಿರ್ಲಕ್ಷಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ವ್ಯವಸ್ಥೆಯನ್ನು ಸ್ವತಃ ಮುಚ್ಚಲಾಗಿದೆ ಎಂದು ಪರಿಗಣಿಸಲಾಗುತ್ತದೆ.
ಹೆಚ್ಚುವರಿಯಾಗಿ, ಬಾಹ್ಯ ಶಕ್ತಿಗಳು ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸಿದರೆ, ಆದರೆ ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷಗಳಲ್ಲಿ ಒಂದರ ಮೇಲೆ ಅವುಗಳ ಪ್ರಕ್ಷೇಪಗಳ ಮೊತ್ತವು ಶೂನ್ಯವಾಗಿರುತ್ತದೆ (ಅಂದರೆ, ಬಲಗಳು ಈ ಅಕ್ಷದ ದಿಕ್ಕಿನಲ್ಲಿ ಸಮತೋಲನದಲ್ಲಿರುತ್ತವೆ), ನಂತರ ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವು ತೃಪ್ತಿಗೊಳ್ಳುತ್ತದೆ. ಈ ದಿಕ್ಕಿನಲ್ಲಿ.
ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವನ್ನು ಸಹ ಕರೆಯಲಾಗುತ್ತದೆ ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮ .
ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮದ ಅನ್ವಯದ ಅತ್ಯಂತ ಗಮನಾರ್ಹ ಉದಾಹರಣೆಯೆಂದರೆ ಜೆಟ್ ಚಲನೆ.
ಜೆಟ್ ಪ್ರೊಪಲ್ಷನ್

ಪ್ರತಿಕ್ರಿಯಾತ್ಮಕ ಚಲನೆಯು ದೇಹದ ಕೆಲವು ಭಾಗವನ್ನು ನಿರ್ದಿಷ್ಟ ವೇಗದಲ್ಲಿ ಬೇರ್ಪಡಿಸಿದಾಗ ಸಂಭವಿಸುವ ಚಲನೆಯಾಗಿದೆ. ದೇಹವು ಸ್ವತಃ ವಿರುದ್ಧವಾಗಿ ನಿರ್ದೇಶಿಸಿದ ಪ್ರಚೋದನೆಯನ್ನು ಪಡೆಯುತ್ತದೆ.
ಜೆಟ್ ಪ್ರೊಪಲ್ಷನ್ನ ಸರಳ ಉದಾಹರಣೆಯೆಂದರೆ ಗಾಳಿಯು ಹೊರಬರುವ ಬಲೂನಿನ ಹಾರಾಟ. ನಾವು ಬಲೂನ್ ಅನ್ನು ಉಬ್ಬಿಸಿ ಮತ್ತು ಅದನ್ನು ಬಿಡುಗಡೆ ಮಾಡಿದರೆ, ಅದು ಹೊರಬರುವ ಗಾಳಿಯ ಚಲನೆಗೆ ವಿರುದ್ಧ ದಿಕ್ಕಿನಲ್ಲಿ ಹಾರಲು ಪ್ರಾರಂಭಿಸುತ್ತದೆ.
ಪ್ರಕೃತಿಯಲ್ಲಿ ಜೆಟ್ ಪ್ರೊಪಲ್ಷನ್ಗೆ ಒಂದು ಉದಾಹರಣೆಯೆಂದರೆ ಅದು ಸಿಡಿಯುವಾಗ ಕ್ರೇಜಿ ಸೌತೆಕಾಯಿಯ ಹಣ್ಣಿನಿಂದ ದ್ರವ ಬಿಡುಗಡೆಯಾಗುತ್ತದೆ. ಅದೇ ಸಮಯದಲ್ಲಿ, ಸೌತೆಕಾಯಿ ಸ್ವತಃ ವಿರುದ್ಧ ದಿಕ್ಕಿನಲ್ಲಿ ಹಾರುತ್ತದೆ.
ಜೆಲ್ಲಿಫಿಶ್, ಕಟ್ಲ್ಫಿಶ್ ಮತ್ತು ಆಳವಾದ ಸಮುದ್ರದ ಇತರ ನಿವಾಸಿಗಳು ನೀರನ್ನು ತೆಗೆದುಕೊಂಡು ನಂತರ ಅದನ್ನು ಎಸೆಯುವ ಮೂಲಕ ಚಲಿಸುತ್ತಾರೆ.
ಜೆಟ್ ಒತ್ತಡವು ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವನ್ನು ಆಧರಿಸಿದೆ. ಜೆಟ್ ಎಂಜಿನ್ ಹೊಂದಿರುವ ರಾಕೆಟ್ ಚಲಿಸಿದಾಗ, ಇಂಧನ ದಹನದ ಪರಿಣಾಮವಾಗಿ, ದ್ರವ ಅಥವಾ ಅನಿಲದ ಜೆಟ್ ಅನ್ನು ನಳಿಕೆಯಿಂದ ಹೊರಹಾಕಲಾಗುತ್ತದೆ ಎಂದು ನಮಗೆ ತಿಳಿದಿದೆ ( ಜೆಟ್ ಸ್ಟ್ರೀಮ್ ) ತಪ್ಪಿಸಿಕೊಳ್ಳುವ ವಸ್ತುವಿನೊಂದಿಗೆ ಎಂಜಿನ್ನ ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಪರಿಣಾಮವಾಗಿ, ಪ್ರತಿಕ್ರಿಯಾತ್ಮಕ ಶಕ್ತಿ . ರಾಕೆಟ್, ಹೊರಸೂಸುವ ವಸ್ತುವಿನೊಂದಿಗೆ ಮುಚ್ಚಿದ ವ್ಯವಸ್ಥೆಯಾಗಿರುವುದರಿಂದ, ಅಂತಹ ವ್ಯವಸ್ಥೆಯ ಆವೇಗವು ಸಮಯದೊಂದಿಗೆ ಬದಲಾಗುವುದಿಲ್ಲ.
ಪ್ರತಿಕ್ರಿಯಾತ್ಮಕ ಬಲವು ವ್ಯವಸ್ಥೆಯ ಭಾಗಗಳ ಪರಸ್ಪರ ಕ್ರಿಯೆಯಿಂದ ಉಂಟಾಗುತ್ತದೆ. ಬಾಹ್ಯ ಶಕ್ತಿಗಳು ಅದರ ಗೋಚರಿಸುವಿಕೆಯ ಮೇಲೆ ಯಾವುದೇ ಪ್ರಭಾವ ಬೀರುವುದಿಲ್ಲ.
ರಾಕೆಟ್ ಚಲಿಸಲು ಪ್ರಾರಂಭಿಸುವ ಮೊದಲು, ರಾಕೆಟ್ ಮತ್ತು ಇಂಧನದ ಪ್ರಚೋದನೆಗಳ ಮೊತ್ತವು ಶೂನ್ಯವಾಗಿತ್ತು. ಪರಿಣಾಮವಾಗಿ, ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ಕಾನೂನಿನ ಪ್ರಕಾರ, ಎಂಜಿನ್ಗಳನ್ನು ಆನ್ ಮಾಡಿದ ನಂತರ, ಈ ಪ್ರಚೋದನೆಗಳ ಮೊತ್ತವೂ ಶೂನ್ಯವಾಗಿರುತ್ತದೆ.
ರಾಕೆಟ್ನ ದ್ರವ್ಯರಾಶಿ ಎಲ್ಲಿದೆ
ಅನಿಲ ಹರಿವಿನ ಪ್ರಮಾಣ
ರಾಕೆಟ್ ವೇಗವನ್ನು ಬದಲಾಯಿಸುವುದು
∆mf - ಇಂಧನ ಬಳಕೆ
ರಾಕೆಟ್ ಸ್ವಲ್ಪ ಸಮಯದವರೆಗೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ ಎಂದು ಭಾವಿಸೋಣ ಟಿ .
ಸಮೀಕರಣದ ಎರಡೂ ಬದಿಗಳನ್ನು ಭಾಗಿಸುವುದು ∆ ಟಿ, ನಾವು ಅಭಿವ್ಯಕ್ತಿ ಪಡೆಯುತ್ತೇವೆ
![]()
ನ್ಯೂಟನ್ರ ಎರಡನೇ ನಿಯಮದ ಪ್ರಕಾರ, ಪ್ರತಿಕ್ರಿಯಾತ್ಮಕ ಬಲವು ಸಮಾನವಾಗಿರುತ್ತದೆ
![]()
ರಿಯಾಕ್ಷನ್ ಫೋರ್ಸ್, ಅಥವಾ ಜೆಟ್ ಥ್ರಸ್ಟ್, ಜೆಟ್ ಎಂಜಿನ್ ಮತ್ತು ಅದರೊಂದಿಗೆ ಸಂಬಂಧಿಸಿದ ವಸ್ತುವಿನ ಚಲನೆಯನ್ನು ಜೆಟ್ ಸ್ಟ್ರೀಮ್ನ ದಿಕ್ಕಿನ ವಿರುದ್ಧ ದಿಕ್ಕಿನಲ್ಲಿ ಖಾತ್ರಿಗೊಳಿಸುತ್ತದೆ.
ಆಧುನಿಕ ವಿಮಾನಗಳು ಮತ್ತು ವಿವಿಧ ಕ್ಷಿಪಣಿಗಳು, ಮಿಲಿಟರಿ, ಬಾಹ್ಯಾಕಾಶ ಇತ್ಯಾದಿಗಳಲ್ಲಿ ಜೆಟ್ ಎಂಜಿನ್ಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ.
ಪ್ರಚೋದನೆದೇಹದ (ಚಲನೆಯ ಪ್ರಮಾಣ) ಒಂದು ಭೌತಿಕ ವೆಕ್ಟರ್ ಪ್ರಮಾಣವಾಗಿದೆ, ಇದು ದೇಹಗಳ ಅನುವಾದ ಚಲನೆಯ ಪರಿಮಾಣಾತ್ಮಕ ಲಕ್ಷಣವಾಗಿದೆ. ಪ್ರಚೋದನೆಯನ್ನು ಗೊತ್ತುಪಡಿಸಲಾಗಿದೆ ಆರ್. ದೇಹದ ಆವೇಗವು ದೇಹದ ದ್ರವ್ಯರಾಶಿ ಮತ್ತು ಅದರ ವೇಗದ ಉತ್ಪನ್ನಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ, ಅಂದರೆ. ಇದನ್ನು ಸೂತ್ರದಿಂದ ಲೆಕ್ಕಹಾಕಲಾಗುತ್ತದೆ:
ಇಂಪಲ್ಸ್ ವೆಕ್ಟರ್ನ ದಿಕ್ಕು ದೇಹದ ವೇಗ ವೆಕ್ಟರ್ನ ದಿಕ್ಕಿನೊಂದಿಗೆ ಹೊಂದಿಕೆಯಾಗುತ್ತದೆ (ಪಥಕ್ಕೆ ಸ್ಪರ್ಶಕವನ್ನು ನಿರ್ದೇಶಿಸಲಾಗಿದೆ). ಉದ್ವೇಗ ಘಟಕವು kg∙m/s ಆಗಿದೆ.
ಕಾಯಗಳ ವ್ಯವಸ್ಥೆಯ ಒಟ್ಟು ಆವೇಗಸಮನಾಗಿರುತ್ತದೆ ವೆಕ್ಟರ್ವ್ಯವಸ್ಥೆಯಲ್ಲಿನ ಎಲ್ಲಾ ದೇಹಗಳ ಪ್ರಚೋದನೆಗಳ ಮೊತ್ತ:
ಒಂದು ದೇಹದ ಆವೇಗದಲ್ಲಿ ಬದಲಾವಣೆಸೂತ್ರದಿಂದ ಕಂಡುಹಿಡಿಯಲಾಗುತ್ತದೆ (ಅಂತಿಮ ಮತ್ತು ಆರಂಭಿಕ ಪ್ರಚೋದನೆಗಳ ನಡುವಿನ ವ್ಯತ್ಯಾಸವು ವೆಕ್ಟರ್ ಎಂದು ಗಮನಿಸಿ):
![]()
ಎಲ್ಲಿ: ಪ n - ಸಮಯದ ಆರಂಭಿಕ ಕ್ಷಣದಲ್ಲಿ ದೇಹದ ಪ್ರಚೋದನೆ, ಪ k - ಅಂತಿಮಕ್ಕೆ. ಮುಖ್ಯ ವಿಷಯವೆಂದರೆ ಕೊನೆಯ ಎರಡು ಪರಿಕಲ್ಪನೆಗಳನ್ನು ಗೊಂದಲಗೊಳಿಸುವುದು ಅಲ್ಲ.
ಸಂಪೂರ್ಣವಾಗಿ ಸ್ಥಿತಿಸ್ಥಾಪಕ ಪರಿಣಾಮ- ಪ್ರಭಾವದ ಅಮೂರ್ತ ಮಾದರಿ, ಇದು ಘರ್ಷಣೆ, ವಿರೂಪತೆ ಇತ್ಯಾದಿಗಳಿಂದ ಶಕ್ತಿಯ ನಷ್ಟವನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳುವುದಿಲ್ಲ. ನೇರ ಸಂಪರ್ಕವನ್ನು ಹೊರತುಪಡಿಸಿ ಯಾವುದೇ ಇತರ ಸಂವಹನಗಳನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳುವುದಿಲ್ಲ. ಸ್ಥಿರ ಮೇಲ್ಮೈಯಲ್ಲಿ ಸಂಪೂರ್ಣವಾಗಿ ಸ್ಥಿತಿಸ್ಥಾಪಕ ಪ್ರಭಾವದೊಂದಿಗೆ, ಪ್ರಭಾವದ ನಂತರ ವಸ್ತುವಿನ ವೇಗವು ಪ್ರಭಾವದ ಮೊದಲು ವಸ್ತುವಿನ ವೇಗಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ, ಅಂದರೆ, ಪ್ರಚೋದನೆಯ ಪ್ರಮಾಣವು ಬದಲಾಗುವುದಿಲ್ಲ. ಅದರ ದಿಕ್ಕು ಮಾತ್ರ ಬದಲಾಗಬಹುದು. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಘಟನೆಯ ಕೋನವು ಪ್ರತಿಫಲನದ ಕೋನಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
ಸಂಪೂರ್ಣವಾಗಿ ಅಸ್ಥಿರ ಪರಿಣಾಮ- ಒಂದು ಹೊಡೆತ, ಇದರ ಪರಿಣಾಮವಾಗಿ ದೇಹಗಳು ಒಂದೇ ದೇಹವಾಗಿ ತಮ್ಮ ಮುಂದಿನ ಚಲನೆಯನ್ನು ಸಂಪರ್ಕಿಸುತ್ತವೆ ಮತ್ತು ಮುಂದುವರಿಸುತ್ತವೆ. ಉದಾಹರಣೆಗೆ, ಪ್ಲಾಸ್ಟಿಸಿನ್ ಚೆಂಡು ಯಾವುದೇ ಮೇಲ್ಮೈ ಮೇಲೆ ಬಿದ್ದಾಗ, ಅದು ಅದರ ಚಲನೆಯನ್ನು ಸಂಪೂರ್ಣವಾಗಿ ನಿಲ್ಲಿಸುತ್ತದೆ; ಎರಡು ಕಾರುಗಳು ಡಿಕ್ಕಿಯಾದಾಗ, ಸ್ವಯಂಚಾಲಿತ ಸಂಯೋಜಕವನ್ನು ಸಕ್ರಿಯಗೊಳಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಅವುಗಳು ಒಟ್ಟಿಗೆ ಚಲಿಸುವುದನ್ನು ಮುಂದುವರಿಸುತ್ತವೆ.
ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮ
ದೇಹಗಳು ಪರಸ್ಪರ ಸಂವಹನ ನಡೆಸಿದಾಗ, ಒಂದು ದೇಹದ ಪ್ರಚೋದನೆಯನ್ನು ಭಾಗಶಃ ಅಥವಾ ಸಂಪೂರ್ಣವಾಗಿ ಮತ್ತೊಂದು ದೇಹಕ್ಕೆ ವರ್ಗಾಯಿಸಬಹುದು. ದೇಹಗಳ ವ್ಯವಸ್ಥೆಯು ಇತರ ದೇಹಗಳಿಂದ ಬಾಹ್ಯ ಶಕ್ತಿಗಳಿಂದ ಕಾರ್ಯನಿರ್ವಹಿಸದಿದ್ದರೆ, ಅಂತಹ ವ್ಯವಸ್ಥೆಯನ್ನು ಕರೆಯಲಾಗುತ್ತದೆ ಮುಚ್ಚಲಾಗಿದೆ.
ಮುಚ್ಚಿದ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ, ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಸೇರಿಸಲಾದ ಎಲ್ಲಾ ದೇಹಗಳ ಪ್ರಚೋದನೆಗಳ ವೆಕ್ಟರ್ ಮೊತ್ತವು ಈ ವ್ಯವಸ್ಥೆಯ ದೇಹಗಳ ಪರಸ್ಪರ ಪರಸ್ಪರ ಕ್ರಿಯೆಗಳಿಗೆ ಸ್ಥಿರವಾಗಿರುತ್ತದೆ. ಪ್ರಕೃತಿಯ ಈ ಮೂಲಭೂತ ನಿಯಮವನ್ನು ಕರೆಯಲಾಗುತ್ತದೆ ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮ (LCM). ಇದರ ಪರಿಣಾಮಗಳು ನ್ಯೂಟನ್ರ ನಿಯಮಗಳು. ಆವೇಗದ ರೂಪದಲ್ಲಿ ನ್ಯೂಟನ್ರ ಎರಡನೇ ನಿಯಮವನ್ನು ಈ ಕೆಳಗಿನಂತೆ ಬರೆಯಬಹುದು:
ಈ ಸೂತ್ರದಿಂದ ಕೆಳಗಿನಂತೆ, ದೇಹಗಳ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಯಾವುದೇ ಬಾಹ್ಯ ಶಕ್ತಿ ಕಾರ್ಯನಿರ್ವಹಿಸದಿದ್ದರೆ ಅಥವಾ ಬಾಹ್ಯ ಶಕ್ತಿಗಳ ಕ್ರಿಯೆಯನ್ನು ಸರಿದೂಗಿಸಿದರೆ (ಪರಿಣಾಮಕಾರಿ ಶಕ್ತಿ ಶೂನ್ಯವಾಗಿರುತ್ತದೆ), ಆಗ ಆವೇಗದಲ್ಲಿನ ಬದಲಾವಣೆಯು ಶೂನ್ಯವಾಗಿರುತ್ತದೆ, ಅಂದರೆ ಒಟ್ಟು ಆವೇಗ ವ್ಯವಸ್ಥೆಯನ್ನು ಸಂರಕ್ಷಿಸಲಾಗಿದೆ:
ಅಂತೆಯೇ, ಆಯ್ಕೆಮಾಡಿದ ಅಕ್ಷದ ಮೇಲಿನ ಬಲದ ಪ್ರಕ್ಷೇಪಣೆಯ ಸಮಾನತೆಯನ್ನು ಶೂನ್ಯಕ್ಕೆ ಕಾರಣವಾಗಿಸಬಹುದು. ಬಾಹ್ಯ ಶಕ್ತಿಗಳು ಒಂದು ಅಕ್ಷದ ಉದ್ದಕ್ಕೂ ಮಾತ್ರ ಕಾರ್ಯನಿರ್ವಹಿಸದಿದ್ದರೆ, ಈ ಅಕ್ಷದ ಮೇಲೆ ಆವೇಗದ ಪ್ರಕ್ಷೇಪಣವನ್ನು ಸಂರಕ್ಷಿಸಲಾಗಿದೆ, ಉದಾಹರಣೆಗೆ:
ಇತರ ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷಗಳಿಗೆ ಇದೇ ರೀತಿಯ ದಾಖಲೆಗಳನ್ನು ಮಾಡಬಹುದು. ಒಂದು ರೀತಿಯಲ್ಲಿ ಅಥವಾ ಇನ್ನೊಂದು ರೀತಿಯಲ್ಲಿ, ಪ್ರಚೋದನೆಗಳು ಸ್ವತಃ ಬದಲಾಗಬಹುದು ಎಂದು ನೀವು ಅರ್ಥಮಾಡಿಕೊಳ್ಳಬೇಕು, ಆದರೆ ಅವುಗಳ ಮೊತ್ತವು ಸ್ಥಿರವಾಗಿರುತ್ತದೆ. ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವು ಅನೇಕ ಸಂದರ್ಭಗಳಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಶಕ್ತಿಗಳ ಮೌಲ್ಯಗಳು ತಿಳಿದಿಲ್ಲದಿದ್ದರೂ ಸಹ ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ದೇಹಗಳ ವೇಗವನ್ನು ಕಂಡುಹಿಡಿಯಲು ಸಾಧ್ಯವಾಗಿಸುತ್ತದೆ.
ಮೊಮೆಂಟಮ್ ಪ್ರೊಜೆಕ್ಷನ್ ಅನ್ನು ಉಳಿಸಲಾಗುತ್ತಿದೆ
ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವು ಕೇವಲ ಭಾಗಶಃ ತೃಪ್ತಿಗೊಂಡಾಗ, ಅಂದರೆ, ಒಂದು ಅಕ್ಷದ ಮೇಲೆ ಪ್ರಕ್ಷೇಪಿಸಿದಾಗ ಮಾತ್ರ ಸಂದರ್ಭಗಳು ಸಾಧ್ಯ. ಒಂದು ಶಕ್ತಿಯು ದೇಹದ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸಿದರೆ, ಅದರ ಆವೇಗವನ್ನು ಸಂರಕ್ಷಿಸಲಾಗುವುದಿಲ್ಲ. ಆದರೆ ನೀವು ಯಾವಾಗಲೂ ಅಕ್ಷವನ್ನು ಆಯ್ಕೆ ಮಾಡಬಹುದು ಆದ್ದರಿಂದ ಈ ಅಕ್ಷದ ಮೇಲೆ ಬಲದ ಪ್ರಕ್ಷೇಪಣವು ಶೂನ್ಯಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ. ನಂತರ ಈ ಅಕ್ಷದ ಮೇಲೆ ಪ್ರಚೋದನೆಯ ಪ್ರಕ್ಷೇಪಣವನ್ನು ಸಂರಕ್ಷಿಸಲಾಗುತ್ತದೆ. ನಿಯಮದಂತೆ, ದೇಹವು ಚಲಿಸುವ ಮೇಲ್ಮೈಯಲ್ಲಿ ಈ ಅಕ್ಷವನ್ನು ಆಯ್ಕೆ ಮಾಡಲಾಗುತ್ತದೆ.
ಎಫ್ಎಸ್ಐನ ಬಹು ಆಯಾಮದ ಪ್ರಕರಣ. ವೆಕ್ಟರ್ ವಿಧಾನ
ದೇಹಗಳು ಒಂದು ಸರಳ ರೇಖೆಯಲ್ಲಿ ಚಲಿಸದ ಸಂದರ್ಭಗಳಲ್ಲಿ, ಸಾಮಾನ್ಯ ಸಂದರ್ಭದಲ್ಲಿ, ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವನ್ನು ಅನ್ವಯಿಸಲು, ಸಮಸ್ಯೆಯಲ್ಲಿ ಒಳಗೊಂಡಿರುವ ಎಲ್ಲಾ ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷಗಳ ಉದ್ದಕ್ಕೂ ಅದನ್ನು ವಿವರಿಸುವುದು ಅವಶ್ಯಕ. ಆದರೆ ನೀವು ವೆಕ್ಟರ್ ವಿಧಾನವನ್ನು ಬಳಸಿದರೆ ಅಂತಹ ಸಮಸ್ಯೆಯನ್ನು ಪರಿಹರಿಸುವುದನ್ನು ಹೆಚ್ಚು ಸರಳಗೊಳಿಸಬಹುದು. ಪರಿಣಾಮದ ಮೊದಲು ಅಥವಾ ನಂತರ ದೇಹಗಳಲ್ಲಿ ಒಂದು ವಿಶ್ರಾಂತಿಯಲ್ಲಿದ್ದರೆ ಇದನ್ನು ಬಳಸಲಾಗುತ್ತದೆ. ನಂತರ ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವನ್ನು ಈ ಕೆಳಗಿನ ವಿಧಾನಗಳಲ್ಲಿ ಒಂದನ್ನು ಬರೆಯಲಾಗಿದೆ:

ವೆಕ್ಟರ್ಗಳನ್ನು ಸೇರಿಸುವ ನಿಯಮಗಳಿಂದ ಈ ಸೂತ್ರಗಳಲ್ಲಿನ ಮೂರು ವೆಕ್ಟರ್ಗಳು ತ್ರಿಕೋನವನ್ನು ರೂಪಿಸಬೇಕು ಎಂದು ಅನುಸರಿಸುತ್ತದೆ. ತ್ರಿಕೋನಗಳಿಗೆ, ಕೊಸೈನ್ ಪ್ರಮೇಯವು ಅನ್ವಯಿಸುತ್ತದೆ.
- ಹಿಂದೆ
- ಮುಂದೆ
ಭೌತಶಾಸ್ತ್ರ ಮತ್ತು ಗಣಿತಶಾಸ್ತ್ರದಲ್ಲಿ CT ಗಾಗಿ ಯಶಸ್ವಿಯಾಗಿ ತಯಾರಿ ಮಾಡುವುದು ಹೇಗೆ?
ಭೌತಶಾಸ್ತ್ರ ಮತ್ತು ಗಣಿತಶಾಸ್ತ್ರದಲ್ಲಿ CT ಗಾಗಿ ಯಶಸ್ವಿಯಾಗಿ ತಯಾರಾಗಲು, ಇತರ ವಿಷಯಗಳ ಜೊತೆಗೆ, ಮೂರು ಪ್ರಮುಖ ಷರತ್ತುಗಳನ್ನು ಪೂರೈಸುವುದು ಅವಶ್ಯಕ:
- ಎಲ್ಲಾ ವಿಷಯಗಳನ್ನು ಅಧ್ಯಯನ ಮಾಡಿ ಮತ್ತು ಈ ಸೈಟ್ನಲ್ಲಿ ಶೈಕ್ಷಣಿಕ ಸಾಮಗ್ರಿಗಳಲ್ಲಿ ನೀಡಲಾದ ಎಲ್ಲಾ ಪರೀಕ್ಷೆಗಳು ಮತ್ತು ಕಾರ್ಯಯೋಜನೆಗಳನ್ನು ಪೂರ್ಣಗೊಳಿಸಿ. ಇದನ್ನು ಮಾಡಲು, ನಿಮಗೆ ಏನೂ ಅಗತ್ಯವಿಲ್ಲ, ಅವುಗಳೆಂದರೆ: ಭೌತಶಾಸ್ತ್ರ ಮತ್ತು ಗಣಿತದಲ್ಲಿ CT ಗಾಗಿ ತಯಾರಿ ಮಾಡಲು, ಸಿದ್ಧಾಂತವನ್ನು ಅಧ್ಯಯನ ಮಾಡಲು ಮತ್ತು ಸಮಸ್ಯೆಗಳನ್ನು ಪರಿಹರಿಸಲು ಪ್ರತಿದಿನ ಮೂರರಿಂದ ನಾಲ್ಕು ಗಂಟೆಗಳ ಕಾಲ ವಿನಿಯೋಗಿಸಿ. ಸತ್ಯವೆಂದರೆ CT ಎನ್ನುವುದು ಭೌತಶಾಸ್ತ್ರ ಅಥವಾ ಗಣಿತವನ್ನು ತಿಳಿದುಕೊಳ್ಳಲು ಸಾಕಾಗುವುದಿಲ್ಲ, ನೀವು ತ್ವರಿತವಾಗಿ ಮತ್ತು ವೈಫಲ್ಯಗಳಿಲ್ಲದೆ ವಿವಿಧ ವಿಷಯಗಳ ಮತ್ತು ವಿಭಿನ್ನ ಸಂಕೀರ್ಣತೆಯ ಹೆಚ್ಚಿನ ಸಂಖ್ಯೆಯ ಸಮಸ್ಯೆಗಳನ್ನು ಪರಿಹರಿಸಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ. ಎರಡನೆಯದನ್ನು ಸಾವಿರಾರು ಸಮಸ್ಯೆಗಳನ್ನು ಪರಿಹರಿಸುವ ಮೂಲಕ ಮಾತ್ರ ಕಲಿಯಬಹುದು.
- ಭೌತಶಾಸ್ತ್ರದಲ್ಲಿ ಎಲ್ಲಾ ಸೂತ್ರಗಳು ಮತ್ತು ಕಾನೂನುಗಳು ಮತ್ತು ಗಣಿತಶಾಸ್ತ್ರದಲ್ಲಿ ಸೂತ್ರಗಳು ಮತ್ತು ವಿಧಾನಗಳನ್ನು ಕಲಿಯಿರಿ. ವಾಸ್ತವವಾಗಿ, ಇದನ್ನು ಮಾಡಲು ತುಂಬಾ ಸರಳವಾಗಿದೆ; ಭೌತಶಾಸ್ತ್ರದಲ್ಲಿ ಕೇವಲ 200 ಅಗತ್ಯ ಸೂತ್ರಗಳಿವೆ, ಮತ್ತು ಗಣಿತದಲ್ಲಿ ಸ್ವಲ್ಪ ಕಡಿಮೆ. ಈ ಪ್ರತಿಯೊಂದು ವಿಷಯಗಳಲ್ಲಿ ಮೂಲಭೂತ ಮಟ್ಟದ ಸಂಕೀರ್ಣತೆಯ ಸಮಸ್ಯೆಗಳನ್ನು ಪರಿಹರಿಸಲು ಸುಮಾರು ಹನ್ನೆರಡು ಪ್ರಮಾಣಿತ ವಿಧಾನಗಳಿವೆ, ಅದನ್ನು ಸಹ ಕಲಿಯಬಹುದು, ಹೀಗಾಗಿ, ಸಂಪೂರ್ಣವಾಗಿ ಸ್ವಯಂಚಾಲಿತವಾಗಿ ಮತ್ತು ಹೆಚ್ಚಿನ CT ಯನ್ನು ಸರಿಯಾದ ಸಮಯದಲ್ಲಿ ಪರಿಹರಿಸುವಲ್ಲಿ ತೊಂದರೆಯಿಲ್ಲ. ಇದರ ನಂತರ, ನೀವು ಅತ್ಯಂತ ಕಷ್ಟಕರವಾದ ಕಾರ್ಯಗಳ ಬಗ್ಗೆ ಮಾತ್ರ ಯೋಚಿಸಬೇಕು.
- ಭೌತಶಾಸ್ತ್ರ ಮತ್ತು ಗಣಿತಶಾಸ್ತ್ರದಲ್ಲಿ ಪೂರ್ವಾಭ್ಯಾಸದ ಪರೀಕ್ಷೆಯ ಎಲ್ಲಾ ಮೂರು ಹಂತಗಳಿಗೆ ಹಾಜರಾಗಿ. ಎರಡೂ ಆಯ್ಕೆಗಳನ್ನು ನಿರ್ಧರಿಸಲು ಪ್ರತಿ RT ಅನ್ನು ಎರಡು ಬಾರಿ ಭೇಟಿ ಮಾಡಬಹುದು. ಮತ್ತೊಮ್ಮೆ, CT ಯಲ್ಲಿ, ಸಮಸ್ಯೆಗಳನ್ನು ತ್ವರಿತವಾಗಿ ಮತ್ತು ಪರಿಣಾಮಕಾರಿಯಾಗಿ ಪರಿಹರಿಸುವ ಸಾಮರ್ಥ್ಯ ಮತ್ತು ಸೂತ್ರಗಳು ಮತ್ತು ವಿಧಾನಗಳ ಜ್ಞಾನದ ಜೊತೆಗೆ, ನೀವು ಸಮಯವನ್ನು ಸರಿಯಾಗಿ ಯೋಜಿಸಲು, ಪಡೆಗಳನ್ನು ವಿತರಿಸಲು ಮತ್ತು ಮುಖ್ಯವಾಗಿ, ಉತ್ತರ ಫಾರ್ಮ್ ಅನ್ನು ಸರಿಯಾಗಿ ಭರ್ತಿ ಮಾಡಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ. ಉತ್ತರಗಳು ಮತ್ತು ಸಮಸ್ಯೆಗಳ ಸಂಖ್ಯೆ ಅಥವಾ ನಿಮ್ಮ ಸ್ವಂತ ಕೊನೆಯ ಹೆಸರನ್ನು ಗೊಂದಲಗೊಳಿಸುವುದು. ಅಲ್ಲದೆ, RT ಸಮಯದಲ್ಲಿ, ಸಮಸ್ಯೆಗಳಲ್ಲಿ ಪ್ರಶ್ನೆಗಳನ್ನು ಕೇಳುವ ಶೈಲಿಗೆ ಬಳಸಿಕೊಳ್ಳುವುದು ಮುಖ್ಯವಾಗಿದೆ, ಇದು DT ಯಲ್ಲಿ ಸಿದ್ಧವಿಲ್ಲದ ವ್ಯಕ್ತಿಗೆ ತುಂಬಾ ಅಸಾಮಾನ್ಯವಾಗಿ ಕಾಣಿಸಬಹುದು.
ಈ ಮೂರು ಅಂಶಗಳ ಯಶಸ್ವಿ, ಶ್ರದ್ಧೆ ಮತ್ತು ಜವಾಬ್ದಾರಿಯುತ ಅನುಷ್ಠಾನವು CT ಯಲ್ಲಿ ಅತ್ಯುತ್ತಮ ಫಲಿತಾಂಶವನ್ನು ತೋರಿಸಲು ನಿಮಗೆ ಅನುಮತಿಸುತ್ತದೆ, ನಿಮ್ಮ ಸಾಮರ್ಥ್ಯದ ಗರಿಷ್ಠ.
ತಪ್ಪು ಕಂಡುಬಂದಿದೆಯೇ?
ತರಬೇತಿ ಸಾಮಗ್ರಿಗಳಲ್ಲಿ ನೀವು ದೋಷವನ್ನು ಕಂಡುಕೊಂಡಿದ್ದೀರಿ ಎಂದು ನೀವು ಭಾವಿಸಿದರೆ, ದಯವಿಟ್ಟು ಇಮೇಲ್ ಮೂಲಕ ಅದರ ಬಗ್ಗೆ ಬರೆಯಿರಿ. ನೀವು ಸಾಮಾಜಿಕ ನೆಟ್ವರ್ಕ್ () ನಲ್ಲಿ ದೋಷವನ್ನು ಸಹ ವರದಿ ಮಾಡಬಹುದು. ಪತ್ರದಲ್ಲಿ, ವಿಷಯ (ಭೌತಶಾಸ್ತ್ರ ಅಥವಾ ಗಣಿತ), ವಿಷಯ ಅಥವಾ ಪರೀಕ್ಷೆಯ ಹೆಸರು ಅಥವಾ ಸಂಖ್ಯೆ, ಸಮಸ್ಯೆಯ ಸಂಖ್ಯೆ ಅಥವಾ ಪಠ್ಯದಲ್ಲಿ (ಪುಟ) ಸ್ಥಳವನ್ನು ಸೂಚಿಸಿ, ಅಲ್ಲಿ ನಿಮ್ಮ ಅಭಿಪ್ರಾಯದಲ್ಲಿ ದೋಷವಿದೆ. ಶಂಕಿತ ದೋಷ ಏನೆಂದು ಸಹ ವಿವರಿಸಿ. ನಿಮ್ಮ ಪತ್ರವು ಗಮನಕ್ಕೆ ಬರುವುದಿಲ್ಲ, ದೋಷವನ್ನು ಸರಿಪಡಿಸಲಾಗುತ್ತದೆ ಅಥವಾ ಅದು ಏಕೆ ದೋಷವಾಗಿಲ್ಲ ಎಂದು ನಿಮಗೆ ವಿವರಿಸಲಾಗುತ್ತದೆ.
ದೇಹದ ದ್ರವ್ಯರಾಶಿಯನ್ನು ಬಿಡಿ ಮೀಕೆಲವು ಅಲ್ಪಾವಧಿಗೆ Δ ಟಿಈ ಬಲದ ಪ್ರಭಾವದ ಅಡಿಯಲ್ಲಿ, ದೇಹದ ವೇಗವು ಬದಲಾಗಿದೆ ![]() ಆದ್ದರಿಂದ, ಸಮಯದಲ್ಲಿ Δ ಟಿದೇಹವು ವೇಗವರ್ಧನೆಯೊಂದಿಗೆ ಚಲಿಸಿತು
ಆದ್ದರಿಂದ, ಸಮಯದಲ್ಲಿ Δ ಟಿದೇಹವು ವೇಗವರ್ಧನೆಯೊಂದಿಗೆ ಚಲಿಸಿತು

ಡೈನಾಮಿಕ್ಸ್ನ ಮೂಲ ನಿಯಮದಿಂದ ( ನ್ಯೂಟನ್ರ ಎರಡನೇ ನಿಯಮ) ಅನುಸರಿಸುತ್ತದೆ:

ದೇಹದ ದ್ರವ್ಯರಾಶಿ ಮತ್ತು ಅದರ ಚಲನೆಯ ವೇಗದ ಉತ್ಪನ್ನಕ್ಕೆ ಸಮಾನವಾದ ಭೌತಿಕ ಪ್ರಮಾಣವನ್ನು ಕರೆಯಲಾಗುತ್ತದೆ ದೇಹದ ಪ್ರಚೋದನೆ(ಅಥವಾ ಚಲನೆಯ ಪ್ರಮಾಣ) ದೇಹದ ಆವೇಗವು ವೆಕ್ಟರ್ ಪ್ರಮಾಣವಾಗಿದೆ. ಉದ್ವೇಗದ SI ಘಟಕವು ಪ್ರತಿ ಸೆಕೆಂಡಿಗೆ ಕಿಲೋಗ್ರಾಂ ಮೀಟರ್ ಆಗಿದೆ (ಕೆಜಿ ಮೀ/ಸೆ).
ಬಲದ ಉತ್ಪನ್ನಕ್ಕೆ ಸಮಾನವಾದ ಭೌತಿಕ ಪ್ರಮಾಣ ಮತ್ತು ಅದರ ಕ್ರಿಯೆಯ ಸಮಯವನ್ನು ಕರೆಯಲಾಗುತ್ತದೆ ಬಲದ ಪ್ರಚೋದನೆ . ಫೋರ್ಸ್ ಇಂಪಲ್ಸ್ ಸಹ ವೆಕ್ಟರ್ ಪ್ರಮಾಣವಾಗಿದೆ.
ಹೊಸ ಪರಿಭಾಷೆಯಲ್ಲಿ ನ್ಯೂಟನ್ರ ಎರಡನೇ ನಿಯಮಈ ಕೆಳಗಿನಂತೆ ರೂಪಿಸಬಹುದು:
ಮತ್ತುದೇಹದ ಆವೇಗದಲ್ಲಿನ ಬದಲಾವಣೆ (ಚಲನೆಯ ಪ್ರಮಾಣ) ಬಲದ ಪ್ರಚೋದನೆಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
ಒಂದು ಅಕ್ಷರದೊಂದಿಗೆ ದೇಹದ ಆವೇಗವನ್ನು ಸೂಚಿಸುತ್ತದೆ, ನ್ಯೂಟನ್ರ ಎರಡನೇ ನಿಯಮವನ್ನು ರೂಪದಲ್ಲಿ ಬರೆಯಬಹುದು
![]()
ಈ ಸಾಮಾನ್ಯ ರೂಪದಲ್ಲಿ ನ್ಯೂಟನ್ ಸ್ವತಃ ಎರಡನೇ ನಿಯಮವನ್ನು ರೂಪಿಸಿದರು. ಈ ಅಭಿವ್ಯಕ್ತಿಯಲ್ಲಿನ ಬಲವು ದೇಹಕ್ಕೆ ಅನ್ವಯಿಸಲಾದ ಎಲ್ಲಾ ಶಕ್ತಿಗಳ ಫಲಿತಾಂಶವನ್ನು ಪ್ರತಿನಿಧಿಸುತ್ತದೆ. ಈ ವೆಕ್ಟರ್ ಸಮಾನತೆಯನ್ನು ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷಗಳ ಮೇಲೆ ಪ್ರಕ್ಷೇಪಗಳಲ್ಲಿ ಬರೆಯಬಹುದು:
ಹೀಗಾಗಿ, ಮೂರು ಪರಸ್ಪರ ಲಂಬವಾಗಿರುವ ಅಕ್ಷಗಳ ಮೇಲೆ ದೇಹದ ಆವೇಗದ ಪ್ರಕ್ಷೇಪಣದಲ್ಲಿನ ಬದಲಾವಣೆಯು ಅದೇ ಅಕ್ಷದ ಮೇಲೆ ಬಲ ಪ್ರಚೋದನೆಯ ಪ್ರಕ್ಷೇಪಣಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ. ಉದಾಹರಣೆಯಾಗಿ ತೆಗೆದುಕೊಳ್ಳೋಣ ಒಂದು ಆಯಾಮದಚಲನೆ, ಅಂದರೆ ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷಗಳಲ್ಲಿ ಒಂದರ ಉದ್ದಕ್ಕೂ ದೇಹದ ಚಲನೆ (ಉದಾಹರಣೆಗೆ, ಅಕ್ಷ OY) ಗುರುತ್ವಾಕರ್ಷಣೆಯ ಪ್ರಭಾವದ ಅಡಿಯಲ್ಲಿ ಆರಂಭಿಕ ವೇಗ v 0 ನೊಂದಿಗೆ ದೇಹವು ಮುಕ್ತವಾಗಿ ಬೀಳಲಿ; ಬೀಳುವ ಸಮಯ ಟಿ. ಅಕ್ಷವನ್ನು ನಿರ್ದೇಶಿಸೋಣ OYಲಂಬವಾಗಿ ಕೆಳಗೆ. ಗುರುತ್ವಾಕರ್ಷಣೆಯ ಪ್ರಚೋದನೆ ಎಫ್ t = ಮಿಗ್ರಾಂಸಮಯದಲ್ಲಿ ಟಿಸಮನಾಗಿರುತ್ತದೆ mgt. ಈ ಪ್ರಚೋದನೆಯು ದೇಹದ ಆವೇಗದಲ್ಲಿನ ಬದಲಾವಣೆಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆ
ಈ ಸರಳ ಫಲಿತಾಂಶವು ಚಲನಶಾಸ್ತ್ರದೊಂದಿಗೆ ಹೊಂದಿಕೆಯಾಗುತ್ತದೆಸೂತ್ರಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧಿತ ಚಲನೆಯ ವೇಗಕ್ಕಾಗಿ. ಈ ಉದಾಹರಣೆಯಲ್ಲಿ, ಶಕ್ತಿಯು ಸಂಪೂರ್ಣ ಸಮಯದ ಮಧ್ಯಂತರದಲ್ಲಿ ಪರಿಮಾಣದಲ್ಲಿ ಬದಲಾಗದೆ ಉಳಿಯುತ್ತದೆ ಟಿ. ಬಲವು ಪ್ರಮಾಣದಲ್ಲಿ ಬದಲಾದರೆ, ಬಲದ ಸರಾಸರಿ ಮೌಲ್ಯವನ್ನು ಬಲದ ಪ್ರಚೋದನೆಗಾಗಿ ಅಭಿವ್ಯಕ್ತಿಗೆ ಬದಲಿಸಬೇಕು. ಎಫ್ಅದರ ಕ್ರಿಯೆಯ ಸಮಯದ ಅವಧಿಯಲ್ಲಿ cf. ಅಕ್ಕಿ. 1.16.1 ಸಮಯ-ಅವಲಂಬಿತ ಬಲದ ಪ್ರಚೋದನೆಯನ್ನು ನಿರ್ಧರಿಸುವ ವಿಧಾನವನ್ನು ವಿವರಿಸುತ್ತದೆ.
ಸಮಯದ ಅಕ್ಷದ ಮೇಲೆ ನಾವು ಸಣ್ಣ ಮಧ್ಯಂತರವನ್ನು ಆಯ್ಕೆ ಮಾಡೋಣ ಟಿ, ಈ ಸಮಯದಲ್ಲಿ ಬಲ ಎಫ್ (ಟಿ) ವಾಸ್ತವಿಕವಾಗಿ ಬದಲಾಗದೆ ಉಳಿದಿದೆ. ಉದ್ವೇಗ ಶಕ್ತಿ ಎಫ್ (ಟಿ) Δ ಟಿಸಮಯದಲ್ಲಿ Δ ಟಿಮಬ್ಬಾದ ಕಾಲಮ್ನ ಪ್ರದೇಶಕ್ಕೆ ಸಮನಾಗಿರುತ್ತದೆ. ಸಂಪೂರ್ಣ ಸಮಯದ ಅಕ್ಷವು 0 ರಿಂದ ಮಧ್ಯಂತರದಲ್ಲಿದ್ದರೆ ಟಿಸಣ್ಣ ಮಧ್ಯಂತರಗಳಾಗಿ ವಿಭಜಿಸಿ Δ ಟಿi, ತದನಂತರ ಎಲ್ಲಾ ಮಧ್ಯಂತರಗಳಲ್ಲಿ ಬಲ ಪ್ರಚೋದನೆಗಳನ್ನು ಒಟ್ಟುಗೂಡಿಸಿ Δ ಟಿi, ನಂತರ ಬಲದ ಒಟ್ಟು ಪ್ರಚೋದನೆಯು ಸಮಯದ ಅಕ್ಷದೊಂದಿಗೆ ಹಂತದ ವಕ್ರರೇಖೆಯಿಂದ ರೂಪುಗೊಂಡ ಪ್ರದೇಶಕ್ಕೆ ಸಮನಾಗಿರುತ್ತದೆ. ಮಿತಿಯಲ್ಲಿ (Δ ಟಿi→ 0) ಈ ಪ್ರದೇಶವು ಗ್ರಾಫ್ನಿಂದ ಸೀಮಿತವಾದ ಪ್ರದೇಶಕ್ಕೆ ಸಮನಾಗಿರುತ್ತದೆ ಎಫ್ (ಟಿ) ಮತ್ತು ಅಕ್ಷ ಟಿ. ಗ್ರಾಫ್ನಿಂದ ಬಲ ಪ್ರಚೋದನೆಯನ್ನು ನಿರ್ಧರಿಸುವ ಈ ವಿಧಾನ ಎಫ್ (ಟಿ) ಸಾಮಾನ್ಯ ಮತ್ತು ಕಾಲಾನಂತರದಲ್ಲಿ ಬಲ ಬದಲಾವಣೆಯ ಯಾವುದೇ ಕಾನೂನುಗಳಿಗೆ ಅನ್ವಯಿಸುತ್ತದೆ. ಗಣಿತದ ಪ್ರಕಾರ, ಸಮಸ್ಯೆ ಕಡಿಮೆಯಾಗುತ್ತದೆ ಏಕೀಕರಣಕಾರ್ಯಗಳು ಎಫ್ (ಟಿ) ಮಧ್ಯಂತರದಲ್ಲಿ.
ಬಲ ಪ್ರಚೋದನೆ, ಅದರ ಗ್ರಾಫ್ ಅನ್ನು ಅಂಜೂರದಲ್ಲಿ ಪ್ರಸ್ತುತಪಡಿಸಲಾಗಿದೆ. 1.16.1, ರಿಂದ ಮಧ್ಯಂತರದಲ್ಲಿ ಟಿ 1 = 0 ಸೆ ಗೆ ಟಿ 2 = 10 ಸೆಗಳು ಇದಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ:
ಈ ಸರಳ ಉದಾಹರಣೆಯಲ್ಲಿ
![]()
ಕೆಲವು ಸಂದರ್ಭಗಳಲ್ಲಿ, ಮಧ್ಯಮ ಶಕ್ತಿ ಎಫ್ಅದರ ಕ್ರಿಯೆಯ ಸಮಯ ಮತ್ತು ದೇಹಕ್ಕೆ ನೀಡಿದ ಪ್ರಚೋದನೆಯು ತಿಳಿದಿದ್ದರೆ cp ಅನ್ನು ನಿರ್ಧರಿಸಬಹುದು. ಉದಾಹರಣೆಗೆ, ಫುಟ್ಬಾಲ್ ಆಟಗಾರನು 0.415 ಕೆಜಿ ದ್ರವ್ಯರಾಶಿಯೊಂದಿಗೆ ಚೆಂಡಿನ ಮೇಲೆ ಬಲವಾದ ಹೊಡೆತವು ಅವನಿಗೆ υ = 30 m/s ವೇಗವನ್ನು ನೀಡುತ್ತದೆ. ಪರಿಣಾಮದ ಸಮಯವು ಸರಿಸುಮಾರು 8·10 –3 ಸೆ.
ನಾಡಿ ಪ, ಸ್ಟ್ರೈಕ್ನ ಪರಿಣಾಮವಾಗಿ ಚೆಂಡಿನಿಂದ ಸ್ವಾಧೀನಪಡಿಸಿಕೊಳ್ಳಲಾಗಿದೆ:
ಆದ್ದರಿಂದ, ಸರಾಸರಿ ಶಕ್ತಿ ಎಫ್ಕಿಕ್ ಸಮಯದಲ್ಲಿ ಫುಟ್ಬಾಲ್ ಆಟಗಾರನ ಪಾದವು ಚೆಂಡಿನ ಮೇಲೆ ವರ್ತಿಸಿದ ಸರಾಸರಿ:
![]()
ಇದು ಬಹಳ ದೊಡ್ಡ ಶಕ್ತಿ. ಇದು 160 ಕೆಜಿ ತೂಕದ ದೇಹದ ತೂಕಕ್ಕೆ ಸರಿಸುಮಾರು ಸಮಾನವಾಗಿರುತ್ತದೆ.
ಬಲದ ಕ್ರಿಯೆಯ ಸಮಯದಲ್ಲಿ ದೇಹದ ಚಲನೆಯು ಒಂದು ನಿರ್ದಿಷ್ಟ ಕರ್ವಿಲಿನಿಯರ್ ಪಥದಲ್ಲಿ ಸಂಭವಿಸಿದಲ್ಲಿ, ದೇಹದ ಆರಂಭಿಕ ಮತ್ತು ಅಂತಿಮ ಪ್ರಚೋದನೆಗಳು ಪ್ರಮಾಣದಲ್ಲಿ ಮಾತ್ರವಲ್ಲದೆ ದಿಕ್ಕಿನಲ್ಲಿಯೂ ಭಿನ್ನವಾಗಿರಬಹುದು. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಆವೇಗದಲ್ಲಿನ ಬದಲಾವಣೆಯನ್ನು ನಿರ್ಧರಿಸಲು ಅದನ್ನು ಬಳಸಲು ಅನುಕೂಲಕರವಾಗಿದೆ ನಾಡಿ ರೇಖಾಚಿತ್ರ
, ಇದು ವಾಹಕಗಳನ್ನು ಚಿತ್ರಿಸುತ್ತದೆ ಮತ್ತು , ಹಾಗೆಯೇ ವೆಕ್ಟರ್ ![]() ಸಮಾನಾಂತರ ಚತುರ್ಭುಜ ನಿಯಮದ ಪ್ರಕಾರ ನಿರ್ಮಿಸಲಾಗಿದೆ. ಅಂಜೂರದಲ್ಲಿ ಉದಾಹರಣೆಯಾಗಿ. ಚಿತ್ರ 1.16.2 ಒರಟಾದ ಗೋಡೆಯಿಂದ ಪುಟಿಯುವ ಚೆಂಡಿನ ಪ್ರಚೋದನೆಗಳ ರೇಖಾಚಿತ್ರವನ್ನು ತೋರಿಸುತ್ತದೆ. ಬಾಲ್ ಸಮೂಹ ಮೀಸಾಮಾನ್ಯ (ಅಕ್ಷ) ಕೋನ α ನಲ್ಲಿ ವೇಗದಲ್ಲಿ ಗೋಡೆಗೆ ಹೊಡೆಯಿರಿ OX) ಮತ್ತು ಕೋನ β ನಲ್ಲಿ ವೇಗದೊಂದಿಗೆ ಅದನ್ನು ಪುಟಿಯಿತು. ಗೋಡೆಯ ಸಂಪರ್ಕದ ಸಮಯದಲ್ಲಿ, ಒಂದು ನಿರ್ದಿಷ್ಟ ಶಕ್ತಿಯು ಚೆಂಡಿನ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ, ಅದರ ದಿಕ್ಕು ವೆಕ್ಟರ್ನ ದಿಕ್ಕಿನೊಂದಿಗೆ ಹೊಂದಿಕೆಯಾಗುತ್ತದೆ.
ಸಮಾನಾಂತರ ಚತುರ್ಭುಜ ನಿಯಮದ ಪ್ರಕಾರ ನಿರ್ಮಿಸಲಾಗಿದೆ. ಅಂಜೂರದಲ್ಲಿ ಉದಾಹರಣೆಯಾಗಿ. ಚಿತ್ರ 1.16.2 ಒರಟಾದ ಗೋಡೆಯಿಂದ ಪುಟಿಯುವ ಚೆಂಡಿನ ಪ್ರಚೋದನೆಗಳ ರೇಖಾಚಿತ್ರವನ್ನು ತೋರಿಸುತ್ತದೆ. ಬಾಲ್ ಸಮೂಹ ಮೀಸಾಮಾನ್ಯ (ಅಕ್ಷ) ಕೋನ α ನಲ್ಲಿ ವೇಗದಲ್ಲಿ ಗೋಡೆಗೆ ಹೊಡೆಯಿರಿ OX) ಮತ್ತು ಕೋನ β ನಲ್ಲಿ ವೇಗದೊಂದಿಗೆ ಅದನ್ನು ಪುಟಿಯಿತು. ಗೋಡೆಯ ಸಂಪರ್ಕದ ಸಮಯದಲ್ಲಿ, ಒಂದು ನಿರ್ದಿಷ್ಟ ಶಕ್ತಿಯು ಚೆಂಡಿನ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ, ಅದರ ದಿಕ್ಕು ವೆಕ್ಟರ್ನ ದಿಕ್ಕಿನೊಂದಿಗೆ ಹೊಂದಿಕೆಯಾಗುತ್ತದೆ.
ದ್ರವ್ಯರಾಶಿಯೊಂದಿಗೆ ಚೆಂಡಿನ ಸಾಮಾನ್ಯ ಪತನದ ಸಮಯದಲ್ಲಿ ಮೀವೇಗದೊಂದಿಗೆ ಸ್ಥಿತಿಸ್ಥಾಪಕ ಗೋಡೆಯ ಮೇಲೆ, ಮರುಕಳಿಸಿದ ನಂತರ ಚೆಂಡು ವೇಗವನ್ನು ಹೊಂದಿರುತ್ತದೆ. ಆದ್ದರಿಂದ, ಮರುಕಳಿಸುವ ಸಮಯದಲ್ಲಿ ಚೆಂಡಿನ ಆವೇಗದಲ್ಲಿನ ಬದಲಾವಣೆಯು ಸಮಾನವಾಗಿರುತ್ತದೆ ![]()
ಅಕ್ಷದ ಮೇಲೆ ಪ್ರಕ್ಷೇಪಗಳಲ್ಲಿ OXಈ ಫಲಿತಾಂಶವನ್ನು ಸ್ಕೇಲಾರ್ ರೂಪದಲ್ಲಿ ಬರೆಯಬಹುದು Δ ಪX = –2ಮೀυ X. ಅಕ್ಷರೇಖೆ OXಗೋಡೆಯಿಂದ ದೂರ ನಿರ್ದೇಶಿಸಲಾಗಿದೆ (ಚಿತ್ರ 1.16.2 ರಂತೆ), ಆದ್ದರಿಂದ υ X < 0 и ΔಪX> 0. ಆದ್ದರಿಂದ, ಮಾಡ್ಯೂಲ್ Δ ಪಆವೇಗದಲ್ಲಿನ ಬದಲಾವಣೆಯು Δ ಸಂಬಂಧದಿಂದ ಚೆಂಡಿನ ವೇಗದ ಮಾಡ್ಯುಲಸ್ υ ಗೆ ಸಂಬಂಧಿಸಿದೆ ಪ = 2ಮೀυ.
ಅವನ ಚಲನೆಗಳು, ಅಂದರೆ. ಗಾತ್ರ
ನಾಡಿವೇಗ ವೆಕ್ಟರ್ನೊಂದಿಗೆ ದಿಕ್ಕಿನಲ್ಲಿ ಹೊಂದಿಕೆಯಾಗುವ ವೆಕ್ಟರ್ ಪ್ರಮಾಣವಾಗಿದೆ.
ಪ್ರಚೋದನೆಯ SI ಘಟಕ: ಕೆಜಿ m/s .
ಕಾಯಗಳ ವ್ಯವಸ್ಥೆಯ ಆವೇಗವು ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಒಳಗೊಂಡಿರುವ ಎಲ್ಲಾ ಕಾಯಗಳ ಆವೇಗದ ವೆಕ್ಟರ್ ಮೊತ್ತಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ:
ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮ
ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ದೇಹಗಳ ವ್ಯವಸ್ಥೆಯು ಬಾಹ್ಯ ಶಕ್ತಿಗಳಿಂದ ಹೆಚ್ಚುವರಿಯಾಗಿ ಕಾರ್ಯನಿರ್ವಹಿಸಿದರೆ, ಉದಾಹರಣೆಗೆ, ಈ ಸಂದರ್ಭದಲ್ಲಿ ಸಂಬಂಧವು ಮಾನ್ಯವಾಗಿರುತ್ತದೆ, ಇದನ್ನು ಕೆಲವೊಮ್ಮೆ ಆವೇಗ ಬದಲಾವಣೆಯ ನಿಯಮ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ:

ಮುಚ್ಚಿದ ವ್ಯವಸ್ಥೆಗೆ (ಬಾಹ್ಯ ಶಕ್ತಿಗಳ ಅನುಪಸ್ಥಿತಿಯಲ್ಲಿ), ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ಕಾನೂನು ಮಾನ್ಯವಾಗಿದೆ:
ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ಕಾನೂನಿನ ಕ್ರಿಯೆಯು ರೈಫಲ್ನಿಂದ ಅಥವಾ ಫಿರಂಗಿ ಶೂಟಿಂಗ್ನಲ್ಲಿ ಗುಂಡು ಹಾರಿಸುವಾಗ ಹಿಮ್ಮೆಟ್ಟುವಿಕೆಯ ವಿದ್ಯಮಾನವನ್ನು ವಿವರಿಸುತ್ತದೆ. ಅಲ್ಲದೆ, ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವು ಎಲ್ಲಾ ಜೆಟ್ ಎಂಜಿನ್ಗಳ ಕಾರ್ಯಾಚರಣಾ ತತ್ವವನ್ನು ಆಧರಿಸಿದೆ.
ದೈಹಿಕ ಸಮಸ್ಯೆಗಳನ್ನು ಪರಿಹರಿಸುವಾಗ, ಚಲನೆಯ ಎಲ್ಲಾ ವಿವರಗಳ ಜ್ಞಾನವು ಅಗತ್ಯವಿಲ್ಲದಿದ್ದಾಗ ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವನ್ನು ಬಳಸಲಾಗುತ್ತದೆ, ಆದರೆ ದೇಹಗಳ ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಫಲಿತಾಂಶವು ಮುಖ್ಯವಾಗಿದೆ. ಅಂತಹ ಸಮಸ್ಯೆಗಳು, ಉದಾಹರಣೆಗೆ, ದೇಹಗಳ ಪ್ರಭಾವ ಅಥವಾ ಘರ್ಷಣೆಯ ಬಗ್ಗೆ ಸಮಸ್ಯೆಗಳು. ಉಡಾವಣಾ ವಾಹನಗಳಂತಹ ವೇರಿಯಬಲ್ ದ್ರವ್ಯರಾಶಿಯ ದೇಹಗಳ ಚಲನೆಯನ್ನು ಪರಿಗಣಿಸುವಾಗ ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವನ್ನು ಬಳಸಲಾಗುತ್ತದೆ. ಅಂತಹ ರಾಕೆಟ್ನ ಹೆಚ್ಚಿನ ದ್ರವ್ಯರಾಶಿ ಇಂಧನವಾಗಿದೆ. ಹಾರಾಟದ ಸಕ್ರಿಯ ಹಂತದಲ್ಲಿ, ಈ ಇಂಧನವು ಸುಟ್ಟುಹೋಗುತ್ತದೆ ಮತ್ತು ಪಥದ ಈ ಭಾಗದಲ್ಲಿ ರಾಕೆಟ್ ದ್ರವ್ಯರಾಶಿ ತ್ವರಿತವಾಗಿ ಕಡಿಮೆಯಾಗುತ್ತದೆ. ಅಲ್ಲದೆ, ಪರಿಕಲ್ಪನೆಯು ಅನ್ವಯಿಸದ ಸಂದರ್ಭಗಳಲ್ಲಿ ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ಕಾನೂನು ಅವಶ್ಯಕವಾಗಿದೆ. ಸ್ಥಾಯಿ ದೇಹವು ಒಂದು ನಿರ್ದಿಷ್ಟ ವೇಗವನ್ನು ತಕ್ಷಣವೇ ಪಡೆದುಕೊಳ್ಳುವ ಪರಿಸ್ಥಿತಿಯನ್ನು ಕಲ್ಪಿಸುವುದು ಕಷ್ಟ. ಸಾಮಾನ್ಯ ಅಭ್ಯಾಸದಲ್ಲಿ, ದೇಹಗಳು ಯಾವಾಗಲೂ ವೇಗವನ್ನು ಪಡೆಯುತ್ತವೆ ಮತ್ತು ಕ್ರಮೇಣ ವೇಗವನ್ನು ಪಡೆಯುತ್ತವೆ. ಆದಾಗ್ಯೂ, ಎಲೆಕ್ಟ್ರಾನ್ಗಳು ಮತ್ತು ಇತರ ಉಪಪರಮಾಣು ಕಣಗಳು ಚಲಿಸಿದಾಗ, ಅವುಗಳ ಸ್ಥಿತಿಯು ಮಧ್ಯಂತರ ಸ್ಥಿತಿಗಳಲ್ಲಿ ಉಳಿಯದೆ ಥಟ್ಟನೆ ಬದಲಾಗುತ್ತದೆ. ಅಂತಹ ಸಂದರ್ಭಗಳಲ್ಲಿ, "ವೇಗವರ್ಧನೆ" ಯ ಶಾಸ್ತ್ರೀಯ ಪರಿಕಲ್ಪನೆಯನ್ನು ಅನ್ವಯಿಸಲಾಗುವುದಿಲ್ಲ.
ಸಮಸ್ಯೆ ಪರಿಹಾರದ ಉದಾಹರಣೆಗಳು
ಉದಾಹರಣೆ 1
| ವ್ಯಾಯಾಮ | 100 ಕೆಜಿ ತೂಕದ ಉತ್ಕ್ಷೇಪಕವು 500 ಮೀ / ಸೆ ವೇಗದಲ್ಲಿ ರೈಲ್ವೆ ಹಳಿಯಲ್ಲಿ ಅಡ್ಡಲಾಗಿ ಹಾರುತ್ತದೆ, 10 ಟನ್ ತೂಕದ ಮರಳಿನ ಕಾರಿಗೆ ಡಿಕ್ಕಿ ಹೊಡೆದು ಅದರಲ್ಲಿ ಸಿಲುಕಿಕೊಳ್ಳುತ್ತದೆ. ಉತ್ಕ್ಷೇಪಕದ ಚಲನೆಯ ವಿರುದ್ಧ ದಿಕ್ಕಿನಲ್ಲಿ 36 ಕಿಮೀ / ಗಂ ವೇಗದಲ್ಲಿ ಚಲಿಸಿದರೆ ಕಾರು ಯಾವ ವೇಗವನ್ನು ಪಡೆಯುತ್ತದೆ? |
| ಪರಿಹಾರ | ಕಾರ್ + ಪ್ರೊಜೆಕ್ಟೈಲ್ ಸಿಸ್ಟಮ್ ಅನ್ನು ಮುಚ್ಚಲಾಗಿದೆ, ಆದ್ದರಿಂದ ಈ ಸಂದರ್ಭದಲ್ಲಿ ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ಕಾನೂನನ್ನು ಅನ್ವಯಿಸಬಹುದು. ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಮೊದಲು ಮತ್ತು ನಂತರ ದೇಹಗಳ ಸ್ಥಿತಿಯನ್ನು ಸೂಚಿಸುವ ರೇಖಾಚಿತ್ರವನ್ನು ಮಾಡೋಣ.
ಉತ್ಕ್ಷೇಪಕ ಮತ್ತು ಕಾರು ಸಂವಹನ ನಡೆಸಿದಾಗ, ಅಸ್ಥಿರ ಪರಿಣಾಮ ಉಂಟಾಗುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ಕಾನೂನನ್ನು ಹೀಗೆ ಬರೆಯಲಾಗುತ್ತದೆ: ಕಾರಿನ ಚಲನೆಯ ದಿಕ್ಕಿನೊಂದಿಗೆ ಹೊಂದಿಕೆಯಾಗುವಂತೆ ಅಕ್ಷದ ದಿಕ್ಕನ್ನು ಆರಿಸುವುದರಿಂದ, ನಾವು ಈ ಸಮೀಕರಣದ ಪ್ರಕ್ಷೇಪಣವನ್ನು ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷಕ್ಕೆ ಬರೆಯುತ್ತೇವೆ: ಉತ್ಕ್ಷೇಪಕವು ಹೊಡೆದ ನಂತರ ಕಾರಿನ ವೇಗ ಎಲ್ಲಿಂದ ಬರುತ್ತದೆ:
ನಾವು ಘಟಕಗಳನ್ನು SI ವ್ಯವಸ್ಥೆಗೆ ಪರಿವರ್ತಿಸುತ್ತೇವೆ: t kg. ಲೆಕ್ಕಾಚಾರ ಮಾಡೋಣ: |
| ಉತ್ತರ | ಶೆಲ್ ಹೊಡೆದ ನಂತರ, ಕಾರು 5 ಮೀ / ಸೆ ವೇಗದಲ್ಲಿ ಚಲಿಸುತ್ತದೆ. |


ಉದಾಹರಣೆ 2
| ವ್ಯಾಯಾಮ | m=10 kg ತೂಕದ ಒಂದು ಉತ್ಕ್ಷೇಪಕವು ಮೇಲ್ಭಾಗದ ಹಂತದಲ್ಲಿ v=200 m/s ವೇಗವನ್ನು ಹೊಂದಿತ್ತು. ಈ ಹಂತದಲ್ಲಿ ಅದು ಎರಡು ಭಾಗಗಳಾಗಿ ಒಡೆಯಿತು. m 1 = 3 ಕೆಜಿ ದ್ರವ್ಯರಾಶಿಯನ್ನು ಹೊಂದಿರುವ ಸಣ್ಣ ಭಾಗವು ಸಮತಲಕ್ಕೆ ಕೋನದಲ್ಲಿ ಅದೇ ದಿಕ್ಕಿನಲ್ಲಿ ವೇಗ v 1 = 400 m/s ಅನ್ನು ಪಡೆಯಿತು. ಹೆಚ್ಚಿನ ಉತ್ಕ್ಷೇಪಕವು ಯಾವ ವೇಗದಲ್ಲಿ ಮತ್ತು ಯಾವ ದಿಕ್ಕಿನಲ್ಲಿ ಹಾರುತ್ತದೆ? |
| ಪರಿಹಾರ | ಉತ್ಕ್ಷೇಪಕದ ಪಥವು ಒಂದು ಪ್ಯಾರಾಬೋಲಾ ಆಗಿದೆ. ದೇಹದ ವೇಗವು ಯಾವಾಗಲೂ ಪಥಕ್ಕೆ ಸ್ಪರ್ಶವಾಗಿ ನಿರ್ದೇಶಿಸಲ್ಪಡುತ್ತದೆ. ಪಥದ ಮೇಲಿನ ಹಂತದಲ್ಲಿ, ಉತ್ಕ್ಷೇಪಕದ ವೇಗವು ಅಕ್ಷಕ್ಕೆ ಸಮಾನಾಂತರವಾಗಿರುತ್ತದೆ.
ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವನ್ನು ಬರೆಯೋಣ: ವೆಕ್ಟರ್ಗಳಿಂದ ಸ್ಕೇಲಾರ್ ಪ್ರಮಾಣಗಳಿಗೆ ಹೋಗೋಣ. ಇದನ್ನು ಮಾಡಲು, ವೆಕ್ಟರ್ ಸಮಾನತೆಯ ಎರಡೂ ಬದಿಗಳನ್ನು ವರ್ಗೀಕರಿಸೋಣ ಮತ್ತು ಇದಕ್ಕಾಗಿ ಸೂತ್ರಗಳನ್ನು ಬಳಸೋಣ: ಅದನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಂಡು, ಎರಡನೆಯ ತುಣುಕಿನ ವೇಗವನ್ನು ನಾವು ಕಂಡುಕೊಳ್ಳುತ್ತೇವೆ: ಭೌತಿಕ ಪ್ರಮಾಣಗಳ ಸಂಖ್ಯಾತ್ಮಕ ಮೌಲ್ಯಗಳನ್ನು ಪರಿಣಾಮವಾಗಿ ಸೂತ್ರಕ್ಕೆ ಬದಲಿಸಿ, ನಾವು ಲೆಕ್ಕಾಚಾರ ಮಾಡುತ್ತೇವೆ: ಹೆಚ್ಚಿನ ಉತ್ಕ್ಷೇಪಕದ ಹಾರಾಟದ ದಿಕ್ಕನ್ನು ನಾವು ಇದನ್ನು ಬಳಸಿ ನಿರ್ಧರಿಸುತ್ತೇವೆ:
ಸಂಖ್ಯಾತ್ಮಕ ಮೌಲ್ಯಗಳನ್ನು ಸೂತ್ರದಲ್ಲಿ ಬದಲಿಸಿ, ನಾವು ಪಡೆಯುತ್ತೇವೆ: |
| ಉತ್ತರ | ಹೆಚ್ಚಿನ ಉತ್ಕ್ಷೇಪಕವು ಸಮತಲ ದಿಕ್ಕಿಗೆ ಕೋನದಲ್ಲಿ 249 ಮೀ/ಸೆ ವೇಗದಲ್ಲಿ ಕೆಳಗೆ ಹಾರುತ್ತದೆ. |



ಉದಾಹರಣೆ 3
| ವ್ಯಾಯಾಮ | ರೈಲಿನ ದ್ರವ್ಯರಾಶಿ 3000 ಟನ್. ಘರ್ಷಣೆ ಗುಣಾಂಕ 0.02. ಚಲನೆ ಪ್ರಾರಂಭವಾದ 2 ನಿಮಿಷಗಳ ನಂತರ ರೈಲು 60 ಕಿಮೀ/ಗಂ ವೇಗವನ್ನು ತಲುಪಲು ಯಾವ ರೀತಿಯ ಲೊಕೊಮೊಟಿವ್ ಇರಬೇಕು? |
| ಪರಿಹಾರ | ರೈಲು (ಬಾಹ್ಯ ಶಕ್ತಿ) ಮೂಲಕ ಕಾರ್ಯನಿರ್ವಹಿಸುವುದರಿಂದ, ವ್ಯವಸ್ಥೆಯನ್ನು ಮುಚ್ಚಲಾಗಿದೆ ಎಂದು ಪರಿಗಣಿಸಲಾಗುವುದಿಲ್ಲ ಮತ್ತು ಈ ಸಂದರ್ಭದಲ್ಲಿ ಆವೇಗದ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವು ತೃಪ್ತಿ ಹೊಂದಿಲ್ಲ. ಆವೇಗ ಬದಲಾವಣೆಯ ನಿಯಮವನ್ನು ಬಳಸೋಣ: ಘರ್ಷಣೆ ಬಲವು ಯಾವಾಗಲೂ ದೇಹದ ಚಲನೆಗೆ ವಿರುದ್ಧ ದಿಕ್ಕಿನಲ್ಲಿ ನಿರ್ದೇಶಿಸಲ್ಪಟ್ಟಿರುವುದರಿಂದ, ಘರ್ಷಣೆ ಬಲದ ಪ್ರಚೋದನೆಯು ಸಮೀಕರಣದ ಪ್ರಕ್ಷೇಪಣವನ್ನು ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷದ ಮೇಲೆ ಪ್ರವೇಶಿಸುತ್ತದೆ (ಅಕ್ಷದ ದಿಕ್ಕು ರೈಲಿನ ಚಲನೆಯ ದಿಕ್ಕಿನೊಂದಿಗೆ ಸೇರಿಕೊಳ್ಳುತ್ತದೆ) "ಮೈನಸ್" ಚಿಹ್ನೆ: |